
【无人机】基于动态反演和扩展状态观测器的无人机鲁棒姿态控制研究(Matlab代码实现)
👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
该文提出一种用于无人机姿态控制的鲁棒反馈线性化控制器。该控制器的目的是使横滚角、俯仰角和偏航角分别跟踪给定的轨迹(命令)。该设计是使用动态反演和扩展状态观测器(ESO)开发的。首先,利用动态反演将无人机姿态系统线性化解耦为3个单输入-单输出(SISO)系统,然后针对这些线性化系统设计3个比例微分(PD)控制器;扩展状态观测器用于估计和补偿未建模的动态和范围干扰。仿真结果表明,所提控制器具有有效性和鲁棒性。
原文摘要:
Abstract
A robust feedback linearization controller is presented for attitude control of an unmanned aerial vehicle (UAV). The objective of this controller is to make the roll angle, pitch angle, and yaw angle track the given trajectories(commands) respectively. This design is developed using dynamic inversion and extended state observer (ESO). Firstly, dynamic inversion is used to linearize and decouple UAV attitude system into three single-input-single-output (SISO) systems, then three proportional-derivative (PD) controllers are designed for these linearized systems. Extended state observers are used to estimate and compensate unmodeled dynamics and extent disturbances. Simulation results show that the proposed controller is effective and robust.
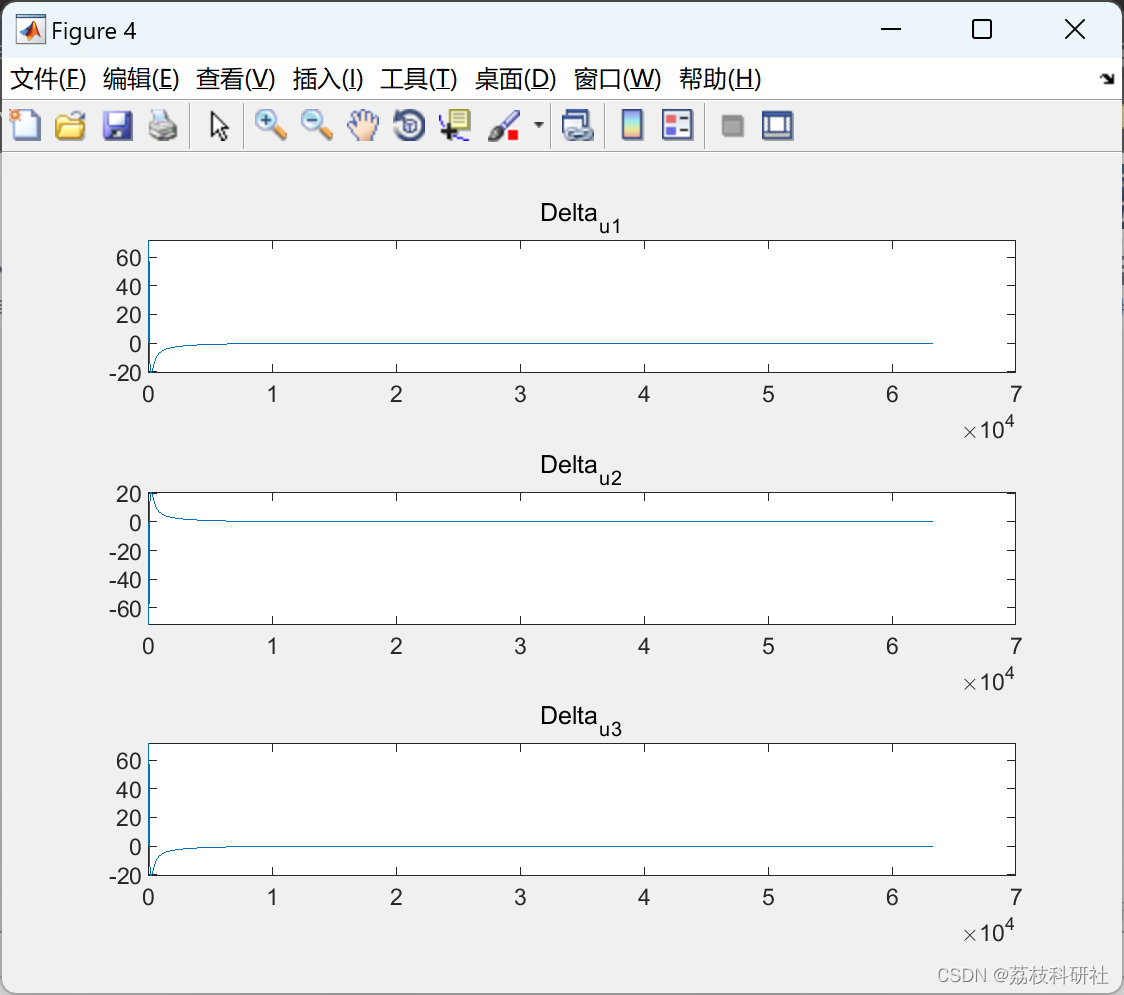
📚2 运行结果





部分代码:
B=[c3+c4*cosd(phi)*tand(teta),c7*sind(phi)*tand(teta),c4+c9*cosd(phi)*tand(teta);
-c4*sind(phi),c7*cosd(phi),-c9*sind(phi);
c4*cosd(phi)*(1/cosd(teta)),c7*sind(phi)*(1/cosd(teta)),c9*cosd(phi)*(1/cosd(teta))];
phidot=p+tand(teta)*(q*sind(phi)+r*cosd(phi));
tetadot=q*cosd(phi)-r*sind(phi);
A1=((c1*r+c2*p)*q)+(tetadot/cosd(teta)^2)*(q*sind(phi)+r*cosd(phi))+tand(teta)*((c5*p*r-c6*(p^2-r^2))*sind(phi)+q*(phidot*cosd(phi))+((c8*p-c2*r)*q)*cosd(phi)-r*phidot*sind(phi));
A2=(c5*p*r-c6*(p^2-r^2))*cosd(phi)-phidot*sind(phi)*q-(((c8*p-c2*r)*q)*sind(phi)+phidot*cosd(phi)*r);
A3=((c5*p*r-c6*(p^2-r^2))*sind(phi)+phidot*cosd(phi)*q+((c8*p-c2*r)*q)*cosd(phi)-phidot*sind(phi)*r)*cosd(teta)/cosd(teta)^2+(tetadot*sind(teta)*(q*sind(phi)+r*cosd(phi)))/cosd(teta)^2;
A=[A1;A2;A3];
%--------------------------------------------------------------------------
Bdot=[c4*cosd(phi)*(tand(teta)^2 + 1)*tetadot - c4*sind(phi)*tand(teta)*phidot,c7*cosd(phi)*tand(teta)*phidot + c7*sind(phi)*(tand(teta)^2 + 1)*tetadot,c9*cosd(phi)*(tand(teta)^2 + 1)*tetadot - c9*sind(phi)*tand(teta)*phidot;
-c4*cosd(phi)*phidot,-c7*sind(phi)*phidot,-c9*cosd(phi)*phidot;
(c4*cosd(phi)*sind(teta)*tetadot)/cosd(teta)^2 - (c4*sind(phi)*phidot)/cosd(teta), (c7*cosd(phi)*phidot)/cosd(teta) + (c7*sind(phi)*sind(teta)*tetadot)/cosd(teta)^2, (c9*cosd(phi)*sind(teta)*tetadot)/cosd(teta)^2 - (c9*sind(phi)*phidot)/cosd(teta)];
%--------------------------------------------------------------------------
pp=inv(B);
L=pp(1,:)*[(kp1*phi_c-x(12))-A1;(kp2*teta_c-x(15))-A2;(kp3*psi_c-x(18))-A3];
M=pp(2,:)*[(kp1*phi_c-x(12))-A1;(kp2*teta_c-x(15))-A2;(kp3*psi_c-x(18))-A3];
N=pp(3,:)*[(kp1*phi_c-x(12))-A1;(kp2*teta_c-x(15))-A2;(kp3*psi_c-x(18))-A3];
pdot=(c1*r+c2*p)*q+c3*L+c4*N;
rdot=(c8*p-c2*r)*q+c4*L+c9*N;
qdot=c5*p*r-c6*(p^2-r^2)+c7*M;
phidotdot=pdot+(tetadot/cosd(teta)^2)*(q*sind(phi)+r*cosd(phi))+tand(teta)*(qdot*sind(phi)+q*(phidot*cosd(phi))+rdot*cosd(phi)-r*phidot*sind(phi));
tetadotdot=qdot*cosd(phi)-phidot*sind(phi)*q-(rdot*sind(phi)+phidot*cosd(phi)*r);
A1dot=(c1*rdot+c2*pdot)*q+qdot*(c1*r+c2*p)+(tetadotdot*cosd(teta)^2+2*tetadot^2*sind(teta)*cosd(teta))/cosd(teta)^4*(q*sind(phi)+r*cosd(phi))+(qdot*sind(phi)+phidot*cosd(phi)*q+rdot*cosd(phi)-phidot*sind(phi)*r)*(tetadot/cosd(teta)^2)+(tetadot/cosd(teta)^2)*((c5*p*r-c6*(p^2-r^2))*sind(phi)+q*(phidot*cosd(phi))+((c8*p-c2*r)*q)*cosd(phi)-r*phidot*sind(phi))+((c5*p*r-c6*(p^2-r^2))*phidot*cosd(phi)+(c5*(pdot*r+rdot*p)-c6*(2*p*pdot-2*r*rdot))*sind(phi)+(qdot*phidot+phidotdot*q)*cosd(phi)-phidot*sind(phi)*q*phidot+(c8*pdot-c2*rdot)*q*cosd(phi)+(qdot*cosd(phi)-phidot*sind(phi)*q)*(c8*p-c2*r)-((rdot*phidot+phidotdot*r)*sind(phi)+phidot*cosd(phi)*r*phidot))*tand(teta);
A2dot=(c5*(pdot*r+rdot*p)-c6*(2*p*pdot-2*r*rdot))*cosd(phi)-phidot*sind(phi)*(c5*p*r-c6*(p^2-r^2))-((phidotdot*q+qdot*phidot)*sind(phi)+phidot*cosd(phi)*phidot*q)-(((c8*pdot-c2*rdot)*q+qdot*(c8*p-c2*r))*sind(phi)+phidot*cosd(phi)*((c8*p-c2*r)*q)+(phidotdot*r+rdot*phidot)*cosd(phi)-phidot*sind(phi)*phidot*r);
A3dot=((((c5*(pdot*r+rdot*p)-c6*(2*p*pdot-2*r*rdot))*sind(phi)+phidot*cosd(phi)*(c5*p*r-c6*(p^2-r^2))+(phidotdot*cosd(phi)-phidot*sind(phi)*phidot)*q+qdot*phidot*cosd(phi)+((c8*pdot-c2*rdot)*q+qdot*(c8*p-c2*r))*cosd(phi)-phidot*sind(phi)*((c8*p-c2*r)*q)-((phidotdot*sind(phi)+phidot*cosd(phi)*phidot)*r+rdot*phidot*sind(phi)))*cosd(teta)-tetadot*sind(teta)*((c5*p*r-c6*(p^2-r^2))*sind(phi)+phidot*cosd(phi)*q+(c5*p*r-c6*(p^2-r^2))*cosd(phi)-phidot*sind(phi)*r))*cosd(teta)^2+2*tetadot*cosd(teta)*sind(teta)*((c5*p*r-c6*(p^2-r^2))*sind(phi)+phidot*cosd(phi)*q+((c8*p-c2*r)*q)*cosd(phi)-phidot*sind(phi)*r)*cosd(teta))/cosd(teta)^4+(((tetadotdot*sind(teta)+tetadot*cosd(teta)*tetadot)*(q*sind(phi)+r*cosd(phi))+(qdot*sind(phi)+phidot*cosd(phi)*q+rdot*cosd(phi)-phidot*sind(phi)*r)*tetadot*sind(teta))*cosd(teta)^2+2*tetadot*cosd(teta)*sind(teta)*(tetadot*sind(teta)*(q*sind(phi)+r*cosd(phi))))/cosd(teta)^4;
Adot=[A1dot;A2dot;A3dot];
%--------------------------------------------------------------------------
u=[L;M;N];
ppdot=[ 0, -(c4*cosd(phi)*phidot)/(c4^2*cosd(phi)^2 + c4^2*sind(phi)^2 - c3*c9*cosd(phi)^2 - c3*c9*sind(phi)^2), (cosd(teta)*(c9*cosd(phi)^2*(tand(teta)^2 + 1)*tetadot - c4*sind(phi)*phidot + c9*sind(phi)^2*(tand(teta)^2 + 1)*tetadot))/(c4^2*cosd(phi)^2 + c4^2*sind(phi)^2 - c3*c9*cosd(phi)^2 - c3*c9*sind(phi)^2) - (sind(teta)*tetadot*(c9*tand(teta)*cosd(phi)^2 + c4*cosd(phi) + c9*tand(teta)*sind(phi)^2))/(c4^2*cosd(phi)^2 + c4^2*sind(phi)^2 - c3*c9*cosd(phi)^2 - c3*c9*sind(phi)^2);
0, -(sind(phi)*phidot)/(c7*cosd(phi)^2 + c7*sind(phi)^2), (cosd(phi)*cosd(teta)*phidot)/(c7*cosd(phi)^2 + c7*sind(phi)^2) - (sind(phi)*sind(teta)*tetadot)/(c7*cosd(phi)^2 + c7*sind(phi)^2);
0, (c3*cosd(phi)*phidot)/(c4^2*cosd(phi)^2 + c4^2*sind(phi)^2 - c3*c9*cosd(phi)^2 - c3*c9*sind(phi)^2), (sind(teta)*tetadot*(c4*tand(teta)*cosd(phi)^2 + c3*cosd(phi) + c4*tand(teta)*sind(phi)^2))/(c4^2*cosd(phi)^2 + c4^2*sind(phi)^2 - c3*c9*cosd(phi)^2 - c3*c9*sind(phi)^2) - (cosd(teta)*(c4*cosd(phi)^2*(tand(teta)^2 + 1)*tetadot - c3*sind(phi)*phidot + c4*sind(phi)^2*(tand(teta)^2 + 1)*tetadot))/(c4^2*cosd(phi)^2 + c4^2*sind(phi)^2 - c3*c9*cosd(phi)^2 - c3*c9*sind(phi)^2)];
v=[(kp1*phi_c-x(12));(kp2*teta_c-x(15));(kp3*psi_c-x(18))];
%************------************----------**************-----------------
e=x(10)-x(1); %y(1)=phi y(10)=Z1_phi
e2=x(13)-x(4); %y(4)=teta y(14)=Z1_teta
e3=x(16)-x(7); %y(7)=psi y(16)=Z1_PSI
%************------************----------**************-----------------
vdot=[beta3*fal(e,alfa2,delta);beta3*fal(e2,alfa2,delta);beta3*fal(e3,alfa2,delta)];
udot=ppdot*(v-A)+pp*(vdot-Adot);
%--------------------------------------------------------------------------
xdot(1)=x(2);
%ydot(2)=A1+B(1,:)*[L;M;N];
xdot(2)=x(3)+kp1*phi_c;
%ydot(3)=A1dot+Bdot(1,:)*u+B(1,:)*udot;
Delta_u1=x(12)+kp1*x(1)+kd1*x(2);
xdot(3)=-kp1*x(2)-kd1*(x(3)+kp1*phi_c)-Delta_u1;
%---ESO1 Z_PHI---
xdot(10)=x(11)-beta1*e; %y(11)=Z2_phi
xdot(11)=x(12)-beta2*fal(e,alfa1,delta)+kp1*phi_c;%y(12)=Z3_phi
xdot(12)=-beta3*fal(e,alfa2,delta);
%--------------------------------------------------------------------------
xdot(4)=x(5);
%ydot(4)=A2+B(2,:)*[L;M;N];
xdot(5)=x(6)+kp2*teta_c;
%ydot(6)=A2dot+Bdot(2,:)*u+B(2,:)*udot;
Delta_u2=x(15)+kp2*x(4)+kd2*x(5);
xdot(6)=-kp2*x(5)-kd1*(x(6)+kp2*teta_c)-Delta_u2;
%---ESO2 Z_Teta---
xdot(13)=x(14)-beta1*e2; %y(15)=Z2_teta
xdot(14)=x(15)-beta2*fal(e2,alfa1,delta)+kp2*teta_c;%y(16)=Z3_teta
xdot(15)=-beta3*fal(e2,alfa2,delta);
%--------------------------------------------------------------------------
xdot(7)=x(8);
%ydot(6)=A3+B(3,:)*[L;M;N];
xdot(8)=x(9)+kp3*psi_c;
%ydot(9)=A3dot+Bdot(3,:)*u+B(3,:)*udot;
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
🌈4 Matlab代码实现
相关文章
- Matlab-------regexp正则表达式
- 【转】C++调用Matlab的.m文件
- 计及需求响应的改进灰狼优化算法求解风、光、柴、储容量优化配置(Matlab代码实现)
- 电力系统潮流【牛顿-拉夫逊法】(4节点、5节点、6节点、9节点)(Matlab代码实现)
- 基于 K 均值聚类的径向基RBF神经网络优化(Matlab代码实现)
- 【库存控制】基于象鼻虫损害优化算法求解库存控制问题(Matlab代码实现)
- 一种改善调制宽带变换器的有意混叠方法(Matlab代码实现)
- 【状态估计】观测信号(包括异常值)的状态估计方法(Matlab代码实现)
- 基于蒙特卡洛法的规模化电动汽车充电负荷预测(Python&Matlab实现)
- 【信号处理】扩展卡尔曼滤波EKF(Matlab代码实现)
- 【信号处理】基于扩展傅里叶的信号分析(Matlab代码实现)
- 【MATLAB】详解时间序列插值计算、日期转换成秒数、获取当前日期
- 【图像处理】基于 MATLAB 将图像从 Adobe RGB 转换为 sRGB 并进行伽马校正的过程
- 基于形态学处理算法的迷宫路线搜索matlab仿真
- Matlab Deep Network Designer APP搭建神经网络及相关函数讲解
- 【状态估计】卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波、库图尔卡尔曼滤波、M-估计、鲁棒立方卡尔曼滤波器实现无人机位置跟踪、迎角和俯仰角跟踪, 方向角度跟踪等研究(Matlab代实现)
- 【伏羲八卦图】(Python&Matlab实现)