
四旋翼飞行器建模与PID控制器设计(Matlab&Simulink)
👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果



可视化代码:
figure('name','垂直速率随时间变化曲线')
plot(t,dzn,'b:',t,dz,'r-','Linewidth',2);
xlabel('时间(s)');
ylabel('垂直速率(m/s)');
legend('期望','实际');
title('垂直速率随时间变化曲线');
grid on;
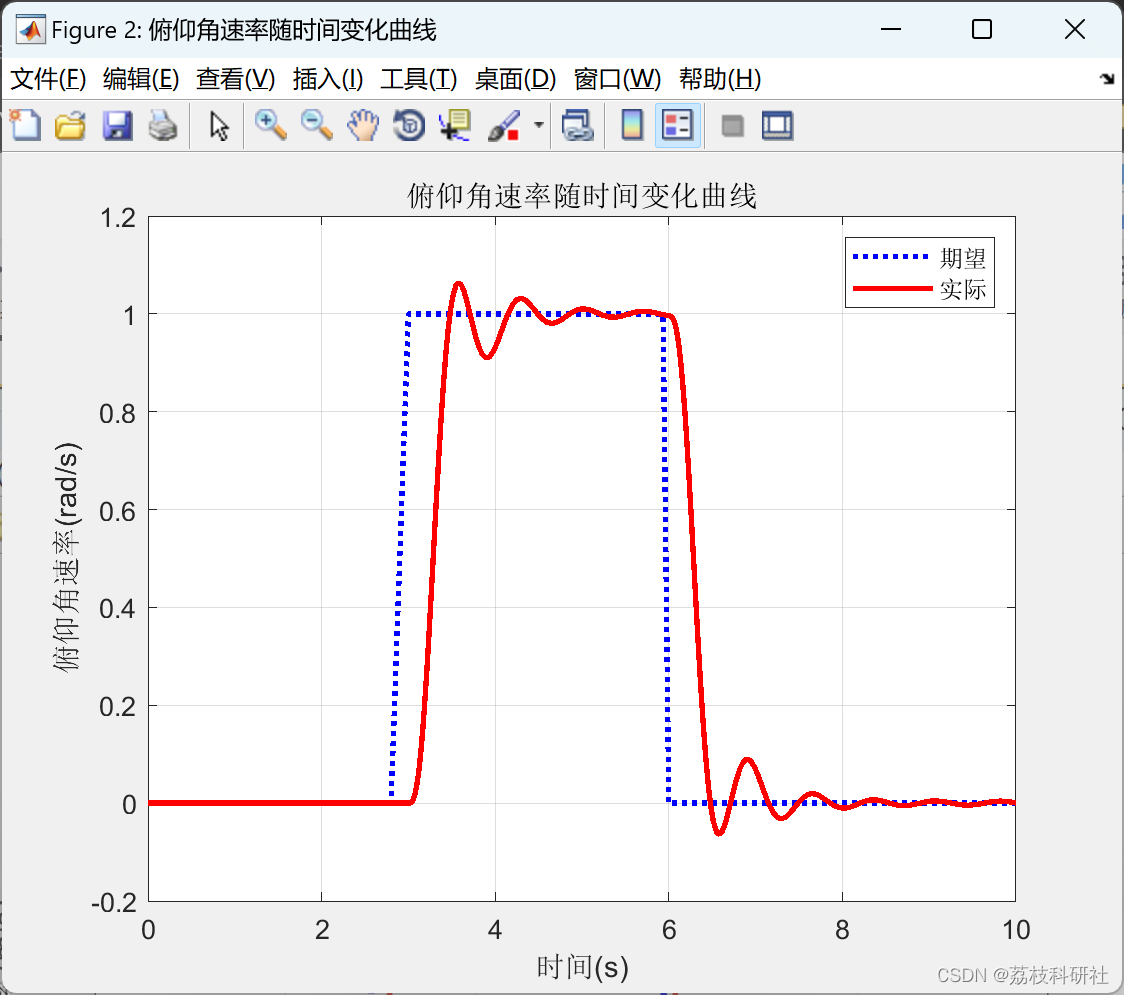
figure('name','俯仰角速率随时间变化曲线')
plot(t,dthetan,'b:',t,dtheta,'r-','Linewidth',2);
xlabel('时间(s)');
ylabel('俯仰角速率(rad/s)');
legend('期望','实际');
title('俯仰角速率随时间变化曲线');
grid on;
figure('name','滚转角速率随时间变化曲线')
plot(t,dphin,'b:',t,dphi,'r-','Linewidth',2);
xlabel('时间(s)');
ylabel('滚转角速率(rad/s)');
legend('期望','实际');
title('滚转角速率随时间变化曲线');
grid on;
figure('name','偏航角速率随时间变化曲线')
plot(t,dpsin,'b:',t,dpsi,'r-','Linewidth',2);
xlabel('时间(s)');
ylabel('偏航角速率(rad/s)');
legend('期望','实际');
title('偏航角速率随时间变化曲线');
grid on;
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]袁琨.四旋翼飞行器建模与控制器设计研究[J].中国设备工程,2023(06):114-116.
[2]曹仁赢. 四旋翼飞行器控制系统设计与研究[D].华东交通大学,2020.DOI:10.27147/d.cnki.ghdju.2020.000343.
🌈4 Matlab代码实现
相关文章
- matlab 求矩阵秩,用MATLAB编程求矩阵的秩
- lasso回归matlab,机器学习Lasso回归重要论文和Matlab代码「建议收藏」
- [AI安全论文] 21.S&P21 Survivalism经典离地攻击(Living-Off-The-Land)恶意软件系统分析
- matlab逆变器仿真程序,PWM逆变器Matlab仿真「建议收藏」
- 【Matlab】如何规范地编写一个MATLAB函数文件
- Garadle 插件扩展属性&源集SourceSets
- matlab保存图片函数后突变分辨变化,MATLAB总结 – 图片保存「建议收藏」
- matlab保存所有图,Matlab中图片保存的5种方法
- 零零信安-D&D数据泄露报警日报【第21期】
- DSSM & Multi-view DSSM TensorFlow实现
- Matlab 直方图_matlab分析
- matlab plot函数详解_MATLAB的plot
- matlab循环语句for_MATLAB以下选择语句错误的是
- Matlab循环语句_matlab中if语句的用法
- Matlab函数定义_matlab子函数
- ECCV2022 &CVPR2022论文速递2022.7.25!
- ECCV2022 &CVPR2022论文速递2022.8.4!
- matlab绘图(六)-图像光滑&数据取点
- Mac重装系统太麻烦?试试App Cleaner & Uninstaller 8轻松清理!
- 快速安装Linux上的MATLAB(linux安装matlab)