
无人车驾驶地面避障(Matlab代码实现)
👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
无人车又称人工智能无人驾驶汽车,其主要是利用人工智能技术,在车内没有驾驶员的情况下,自动控制车辆行驶方向、速度和姿态,使汽车能够安全顺利到达目标点,从而实现无人自动驾驶。无人车概念最早是在20世纪七十年代由美国人提出,由于当时人工智能技术还不够成熟,在后来较长一段时间内没有取得实质性的进展。当前常用的路径规划方法主要为基于遗传算法的避障路径规划,以及基于栅格法的避障路径规划,这两种方法存在一个共性问题,即规划的无人车避障路径拐点较多,路径平滑性较低,无法满足无人车避障路径规划的实际需求。
📚2 运行结果


部分代码:
clear all;
close all;
x = 0:0.2:0.2*(31-1);
y = 0:0.2:0.2*(100-1);
% goal point
% threat obstacle
for iter = 1 : 31
for iter_j = 1 : 99
cost(iter,iter_j) = (0.5*cos(x(iter))+0.6)*exp(-(y(iter_j)/y(iter_j+1)));
end
end
figure(2)
surf(y(1:99),x,cost);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (rad)')
zlabel('cost')
% agent
for iter = 1 : 31
for iter_j = 1 : 99
cost(iter,iter_j) = 0.3*(0.5*cos(x(iter))+0.6)*exp(-(y(iter_j)));
end
end
figure(3)
surf(y(1:99),x,cost);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (rad)')
zlabel('cost')
% swarm
for iter = 1 : 31
for iter_j = 1 : 99
cost_goal(iter,iter_j) = 1-exp(-(y(iter_j))/y(iter_j+1));
end
end
x = 0:0.2:0.2*(31-1);
y = 0:0.2:0.2*(100-1);
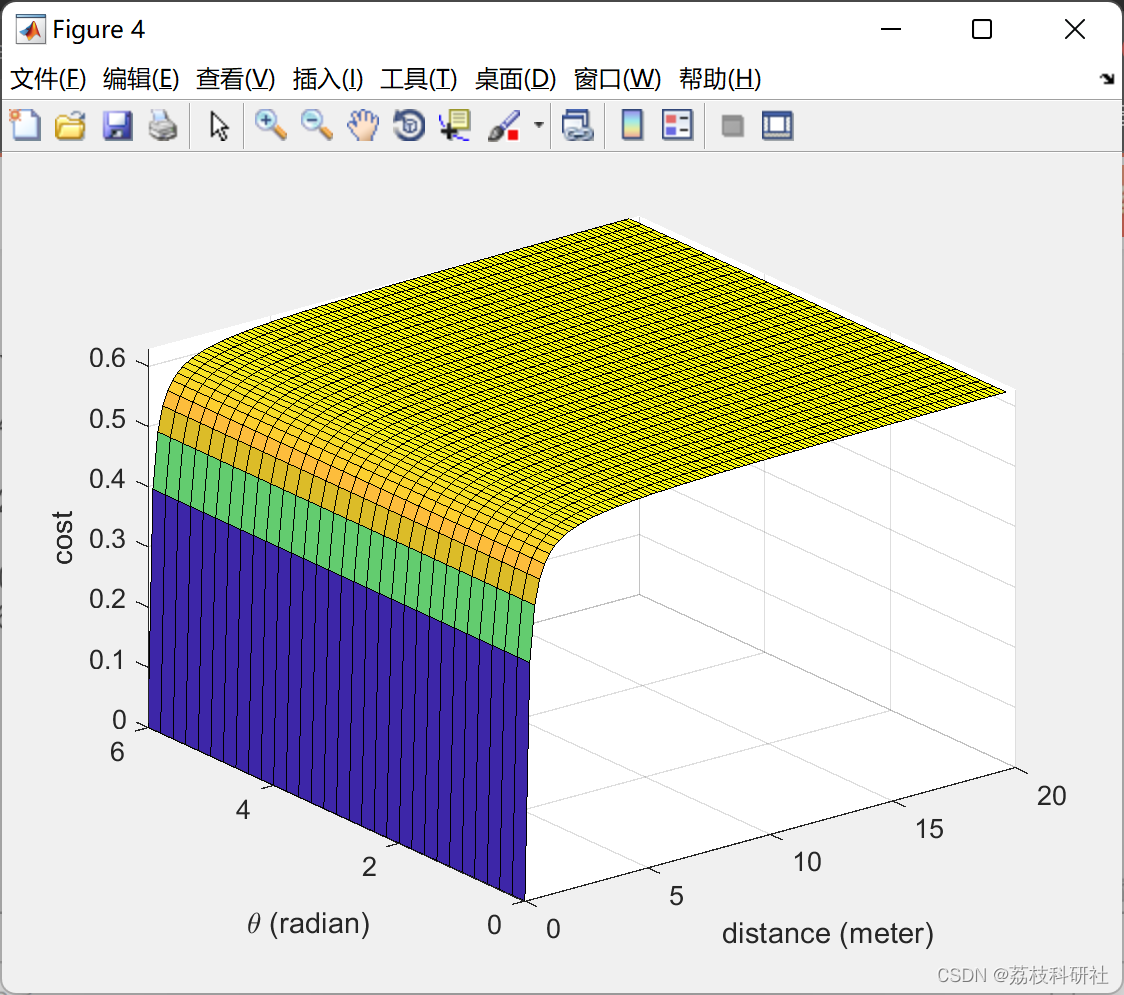
figure(4)
surf(y(1:99),x,cost_goal);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (radian)')
zlabel('cost')
clear all;
close all;
x = 0:0.2:0.2*(31-1);
y = 0:0.2:0.2*(100-1);
% goal point
% threat obstacle
for iter = 1 : 31
for iter_j = 1 : 99
cost(iter,iter_j) = (0.5*cos(x(iter))+0.6)*exp(-(y(iter_j)/y(iter_j+1)));
end
end
figure(2)
surf(y(1:99),x,cost);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (rad)')
zlabel('cost')
% agent
for iter = 1 : 31
for iter_j = 1 : 99
cost(iter,iter_j) = 0.3*(0.5*cos(x(iter))+0.6)*exp(-(y(iter_j)));
end
end
figure(3)
surf(y(1:99),x,cost);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (rad)')
zlabel('cost')
% swarm
for iter = 1 : 31
for iter_j = 1 : 99
cost_goal(iter,iter_j) = 1-exp(-(y(iter_j))/y(iter_j+1));
end
end
x = 0:0.2:0.2*(31-1);
y = 0:0.2:0.2*(100-1);
figure(4)
surf(y(1:99),x,cost_goal);
% shading interp;
xlabel('distance (meter)')
ylabel('\theta (radian)')
zlabel('cost')
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]蒋正荣,沈奔豪.基于动态人工势场法的无人车避障路径规划方法[J].自动化应用,2022(07):1-3+7.DOI:10.19769/j.zdhy.2022.07.001.
[2]方朋朋,杨家富,施杨洋,于凌宇.基于梯度下降法和改进人工势场法的无人车避障方法[J].制造业自动化,2018,40(11):81-84.
🌈4 Matlab代码实现
相关文章
- matlab直方图均衡化代码各种方法_数据直方图matlab代码
- 随机振动 matlab,Matlab内建psd函数在工程随机振动谱分析中的修正方法「建议收藏」
- nsga2 matlab,NSGA2算法特征选择MATLAB实现(多目标)
- [图像]Canny检测的Matlab实现(含代码)「建议收藏」
- matlab中如何求插值点,MATLAB插值「建议收藏」
- matlab fir带通滤波,基于Matlab的FIR带通滤波器设计与实现
- Matlab中的偏最小二乘法(PLS)回归模型,离群点检测和变量选择|附代码数据
- 遗传算法经典实例matlab代码_遗传算法编码方式
- matlab运行结果图片如何保存_应对数据丢失最简单的方法
- 遗传算法优化bp神经网络matlab代码_神经网络进化算法
- bp神经网络及matlab实现_bp神经网络应用实例Matlab
- matlab读.h5文件「建议收藏」
- MATLAB R2021b for Mac(数学分析软件)汉化版
- butterworth matlab,Matlab实现Butterworth滤波器
- lagrange插值法:求拉格朗日插值多项式matlab实现(内附代码及例题)
- 图像去色算法_matlab去雾算法
- matlab代码实现四阶龙格库塔求解微分方程
- 详细步骤讲解matlab代码通过Coder编译为c++并用vs2019调用
- Matlab马尔可夫链蒙特卡罗法(MCMC)估计随机波动率(SV,Stochastic Volatility) 模型|附代码数据
- Matlab中的偏最小二乘法(PLS)回归模型,离群点检测和变量选择|附代码数据
- Matlab用深度学习循环神经网络RNN长短期记忆LSTM进行波形时间序列数据预测|附代码数据
- Matlab 2022软件的安装方法、下载、激活教程
- 如何写出让人看不懂的MATLAB代码?
- MATLAB图像倾斜校正算法实现:图像倾斜角检测及校正|附代码数据