
【图像处理】用于图像分类的局部约束线性编码(Python代码实现)
💥💥💥💞💞💞欢迎来到本博客❤️❤️❤️💥💥💥
📋📋📋本文目录如下:⛳️⛳️⛳️
目录

1 概述
经过训练的分类模型可以准确识别出图像中的具体对象,找出“图像中有什么”,但针对诸如“图片描述了什么”的抽象概念标签的图像分类问题研究较少,研究难度也更大。抽象概念标签不属于图像中包含的任何一个具体的对象,而是由许多不同的概念混合在一起,所以直接学习这个抽象标签相当困难。为了解决这类抽象标签的图像分类问题,借助多示例学习方法思路,设计并实现了多示例两阶段模型。
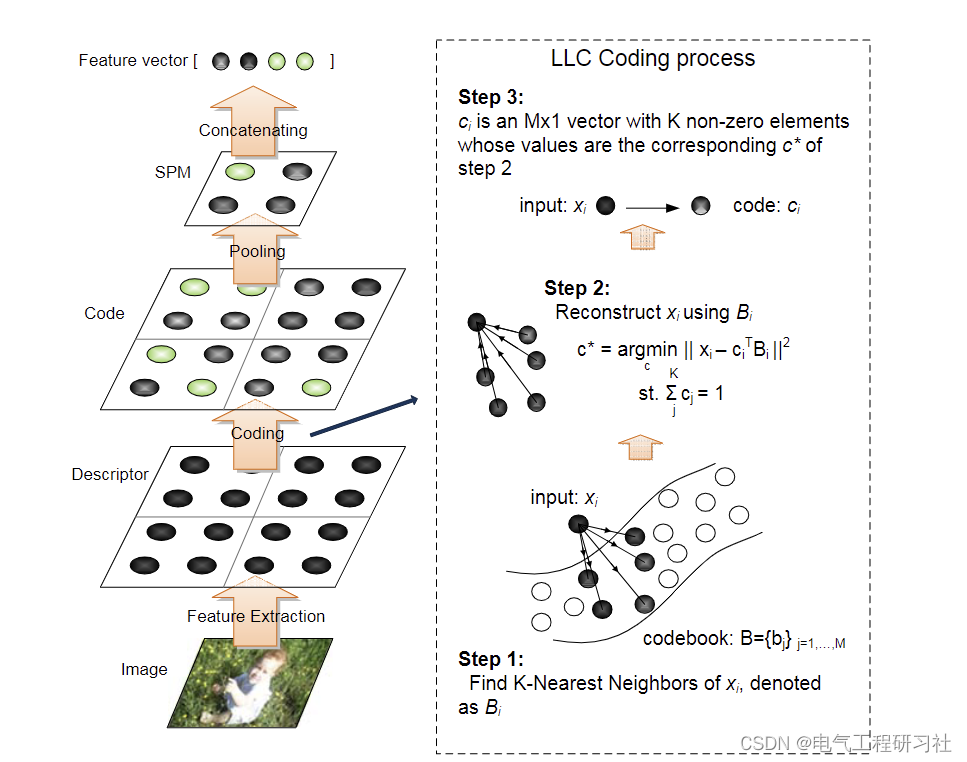
他最近最先进的图像分类系统由两个主要部分组成:特征袋 (BoF) [19, 4] 和空间金字塔匹配 (SPM) [15]。 BoF 方法将图像表示为其局部特征的直方图。它对特征的空间转换特别健壮,并且在全图像分类任务中表现出不错的性能。然而,BoF 方法忽略了有关特征空间布局的信息,因此无法捕获形状或定位对象。尽管传统的 SPM 方法在图像分类方面效果很好,但人们凭经验发现,为了获得良好的性能,传统的 SPM 必须使用具有非线性 Mercer 核的分类器,例如卡方核。因此,非线性分类器必须提供额外的计算复杂度,在训练中承载 O(n3),在 SVM 中承载 O(n),其中 n 是支持向量的数量。这意味着 SPM 方法对于实际应用程序的可扩展性较差。
基于基于特征包(BoF)的传统 SPM 方法需要非线性分类器来实现良好的图像分类性能。本文提出了一种简单但有效的编码方案,称为局部约束线性编码 (LLC),以代替传统 SPM 中的 VQ 编码。 LLC利用局部性约束将每个描述符投影到其局部坐标系中,并通过最大池化整合投影坐标以生成最终表示。使用线性分类器,所提出的方法的性能明显优于传统的非线性 SPM,在多个基准测试中实现了最先进的性能。与稀疏编码策略 [22] 相比,LLC 使用的目标函数具有解析解。此外,本文提出了一种快速逼近LLC方法,首先执行K最近邻搜索,然后求解约束最小二乘拟合问题,计算复杂度为O(M + K2)。因此,即使有非常大的码本,我们的系统仍然可以每秒处理多个帧。这种效率显着增加了 LLC 在实际应用中的实用价值。
2 数学模型
详细数学模型见:用于图像分类|的局部性约束线性编码IEEE会议出版|IEEE Xplore
3 实验结果
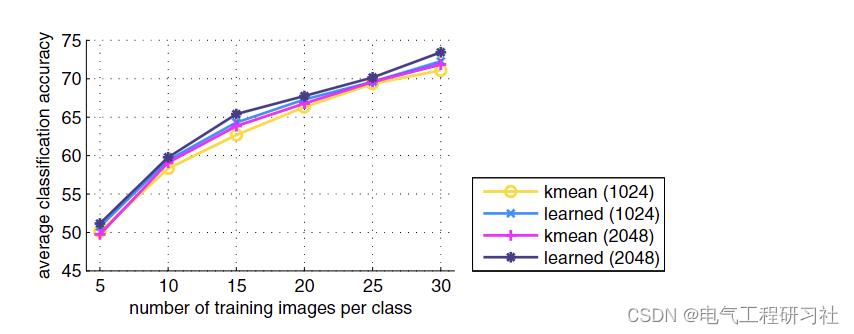
在本节中,我们基于三个广泛使用的数据集报告结果:Caltech-101 [7]、Caltech-256 [11] 和 Pascal VOC 2007 [6]。在整个实验过程中,我们仅使用了一个描述符,即定向梯度直方图 (HOG) [5]。在我们的设置中,HOG 特征是从图像上每 8 个像素密集定位的块中提取的,分别在 16×16、25×25 和 31×31 三个尺度下。每个 HOG 描述符的维数为 128。在 LLC 处理过程中,仅使用了近似的 LLC,并且邻居的数量设置为 5(第 3 节),具有移位不变约束。在“SPM”层,对于每个空间子区域。
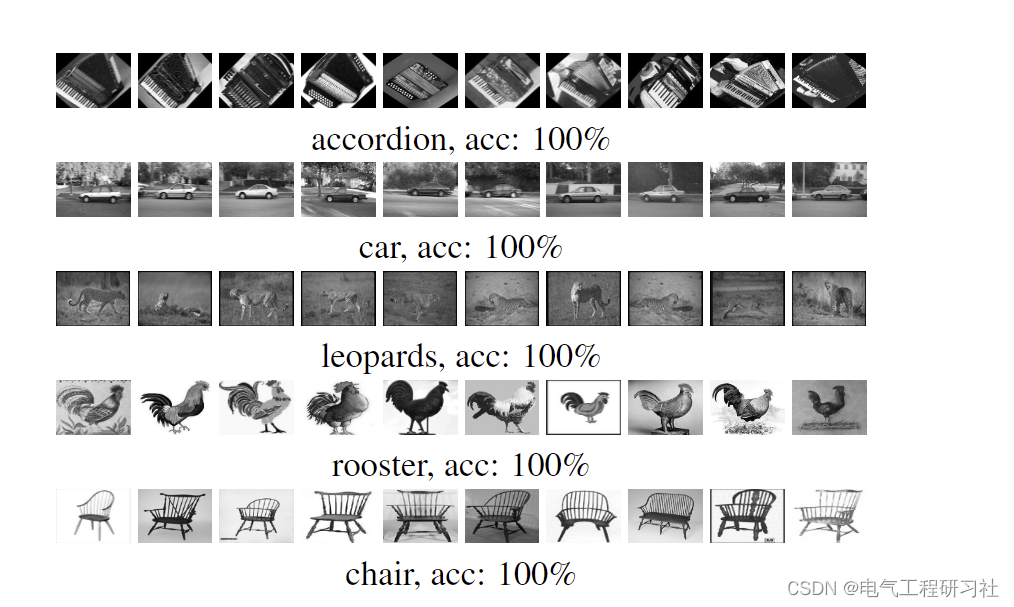
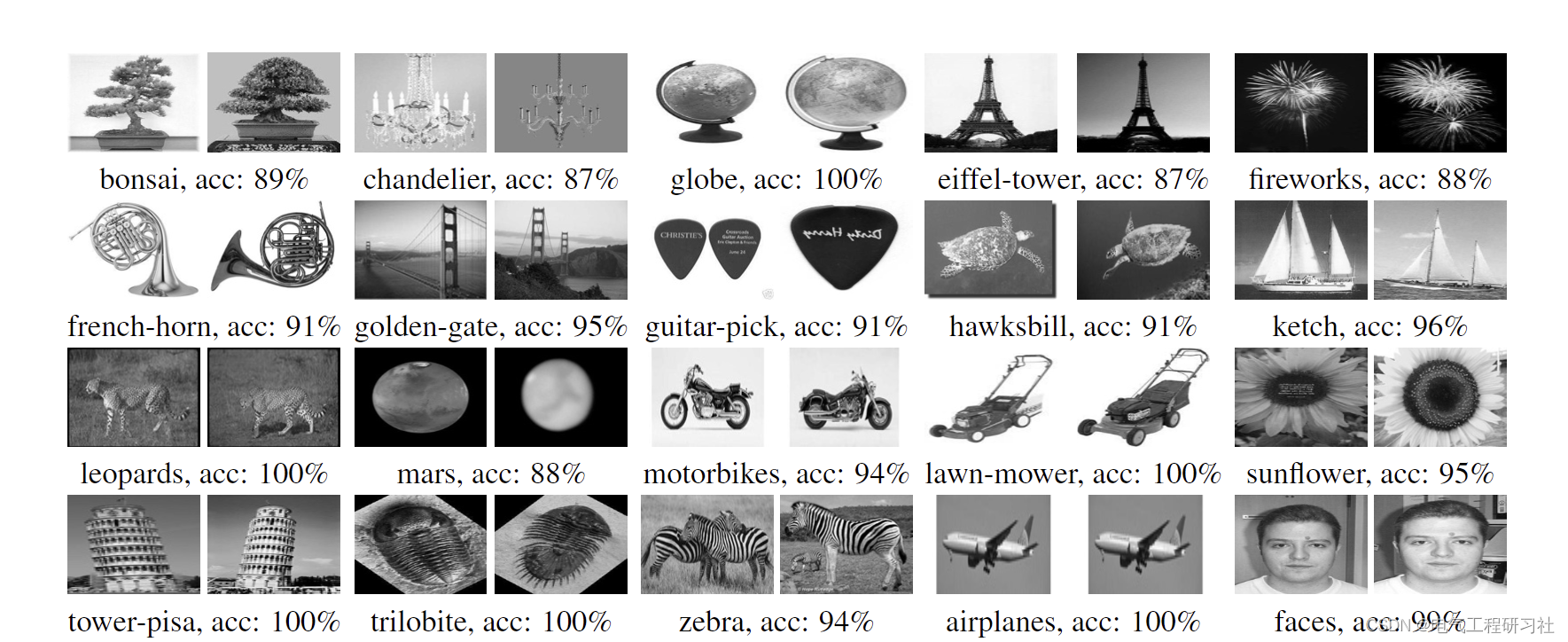
来自 Caltech-256 数据中分类准确度最高的类别的示例图像

4 Python代码实现
部分代码:
import numpy as np
import numpy.linalg
import math
import os.path
from LLC_coding_appr import LLC_coding_appr
def LLC_pooling(B,X,pyramid,knn,img_width,img_height,X1,Y):
dSize = B.shape[1]
nSmp = X.shape[1]
idxBin = np.transpose(np.zeros(nSmp))5 写在最后
部分理论引用网络文献,若有侵权请联系博主删除。
相关文章
- 怎么在python中安装matplotlib_matplotlib依赖库
- python中矩阵的转置怎么写_Python 矩阵转置的几种方法小结
- 哪些软件是python编写出来的_用Python编程需要什么软件?
- 【Python 局域网控制】——做一个超简单的局域网指令控制电脑
- Python元组_python元组的定义方式
- python语言一般用于什么_PYthon
- Python抓取数据_python抓取游戏数据
- python chr()和ord()_Python函数ord
- 【说站】python异常中else的使用
- 【说站】Python操作PgSQL数据库的方法
- python输出unicode编码_Python以utf8编码读取文件
- python2 nonlocal_python关键字及用法
- PYTHON主机_我的Python世界PDF
- Q学习(Q-learning)入门小例子及python实现
- 分享Python网络爬虫过程中编码和解码常用的一个库
- 力扣刷题笔记--12. 整数转罗马数字 python解法
- Python提取WPS和Word两种版本docx文档中超链接文本和地址
- python交互模式下方向键乱码的正确解决方法
- Python 抓取并解码原始数据包
- python数据分析浅谈(2)
- python-Python与SQLite数据库-SQLite数据库的基本知识(二)
- Python encode()和decode()方法:字符串编码转换
- Python字符串编码格式有哪些
- Python 开发者如何正确使用 RStudio 编辑器
- Python变量类型及命名规则介绍
- 跟老齐学Python之一个免费的实验室