
【目标检测】26、IoU Loss: UnitBox: An Advanced Object Detection Network
论文:UnitBox: An Advanced Object Detection Network
出处:ACM MM 2016
一、背景
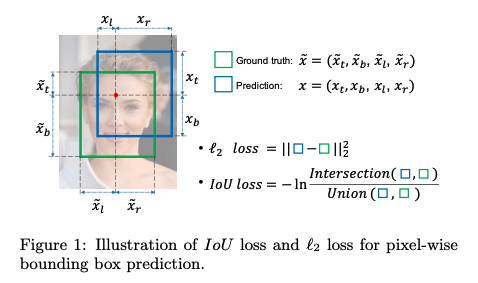
在目标检测任务中,回归任务很多都使用 L n L_n Ln Loss,如 L1、Smooth L1、L2 等,它们通常都是计算角点的距离来衡量 Loss 的大小,指导模型的训练。
L2 loss 的局限性:
- 对于不同质量的 anchor,可能得到相同的 L2 距离结果。
- L2 loss 对框的四个边分别优化,忽略了一个目标的四条边界之间的关系,可能导致一个框的某两条边非常准确,但另外的边误差很大。
- 对尺度非常敏感,大的 gt 框和其对应的 anchor 框可能距离较大,但相比框本身的大小来说这个距离较小,但模型会更注重大框的优化来拉低 Loss,忽略了一些小目标。
二、方法
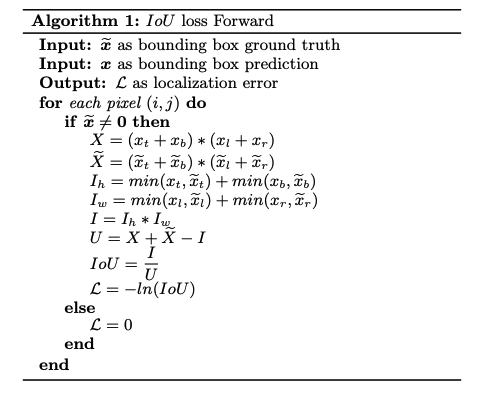
本文提出了 IoU loss
L
I
o
U
=
−
l
n
(
I
o
U
)
L_{IoU}=-ln(IoU)
LIoU=−ln(IoU)
通常为了简便起见,也写作:
L
I
o
U
=
1
−
I
o
U
L_{IoU}=1-IoU
LIoU=1−IoU
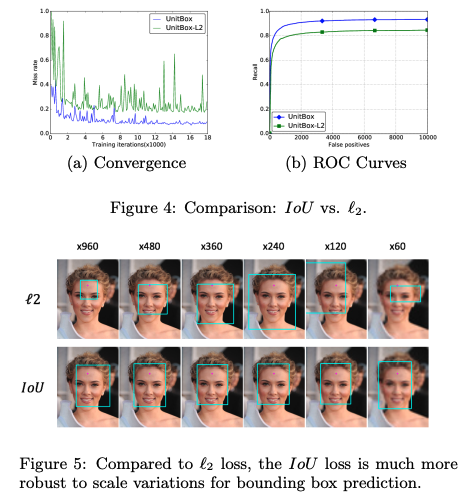
IoU Loss 的优点:
- 收敛速度比 L2 loss 快也更稳定,如图 4 所示
- 对尺度的变化更加鲁棒,如图 5 所示,将图像 resize 成多个不同的尺度,IoU loss 表现的更稳定,而 L2 loss 不太稳定
相关文章
- 使用finfo_file()函数检测上传图片的类型
- (不断更新)关于显著性检测的调研-Salient Object Detection: A Survey
- OpenCV每日函数 Object Detection目标检测模块 (3) 二维码检测和生成
- 【目标检测】目标检测遇上知识图谱:Object detection meets knowledge graphs论文解读与复现
- 【目标检测】61、Dynamic Head Unifying Object Detection Heads with Attentions
- 【目标检测】22、Generalized Focal Loss V1
- 【目标检测】19、FCOS: Fully Convolutional One-Stage Object Detection
- 【目标检测】13、Towards Accurate One-Stage Object Detection with AP-Loss
- CV之FD之HOG:图像检测之基于HOG算法、简介、代码实现(计算图像相似度)之详细攻略
- Paper之EfficientDet: 《Scalable and Efficient Object Detection—可扩展和高效的目标检测》的翻译及其解读
- VL26-含有无关项的序列检测(状态机法保持或继续下一个状态)+检测序列是011_xxx_110,满足条件,out=1。仿真验证正确!
- 如何检测Windows中的横向渗透攻击——还是EDR能力为主啊
- 知识图谱 知识计算--- 本体推理 规则推理 路径计算 社区计算 相似图计算 链接预测 不一致检测
- 目标检测算法——将xml格式转换为YOLOv5格式txt
- 目标检测算法——图像分割数据集汇总 2(附下载链接)
- 【OpenCV 例程 300篇】256. 特征检测之 CenSurE(StarDetector)算法
- 【边缘检测】RCN:Object Contour and Edge Detection with RefineContourNet
- 【文本检测】2、DBNet++ | 为 DBNet 引入多级特征图聚合模块 ASF
- 【CV】第 7 章:使用 YOLO 进行对象检测
- Python基于改进YOLOv5的烟叶病害检测系统(附带源码)
- 论文《Focal Loss for Dense Object Detection》Detectron2的安装与测试(测试案例:全景分割、姿态估计、实例分割、目标检测 - Faster R-CNN)
- Object s 365目标检测 数据集