
CloudCompare——点云平面拟合
点云 拟合 平面
2023-09-14 09:01:40 时间
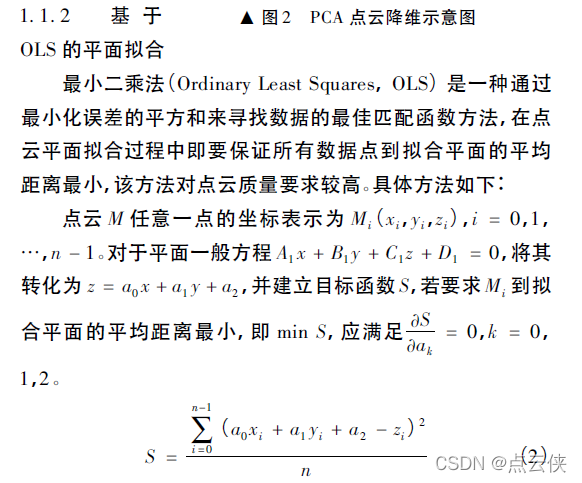
1.平面拟合
2.参考文献
[1]安超,赵文政,刘银华.面向车身虚拟匹配的非均匀点云数据配准算法[J].机械设计与研究,2021,37(04):129-134.DOI:10.13952/j.cnki.jofmdr.2021.0151.
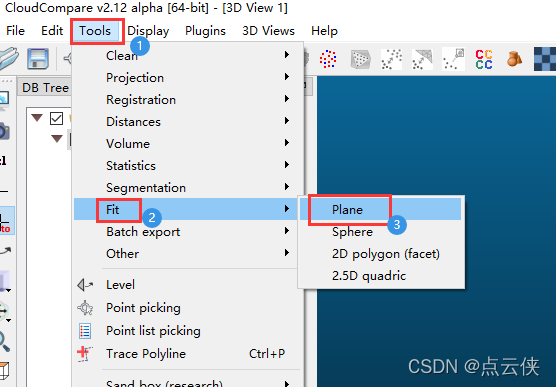
3.操作流程
通过Tools > Fit > Plane菜单访问。该工具在点云上拟合一个平面,并输出各种信息,如拟合均数、平面法线,甚至地质倾角和倾角方向值。
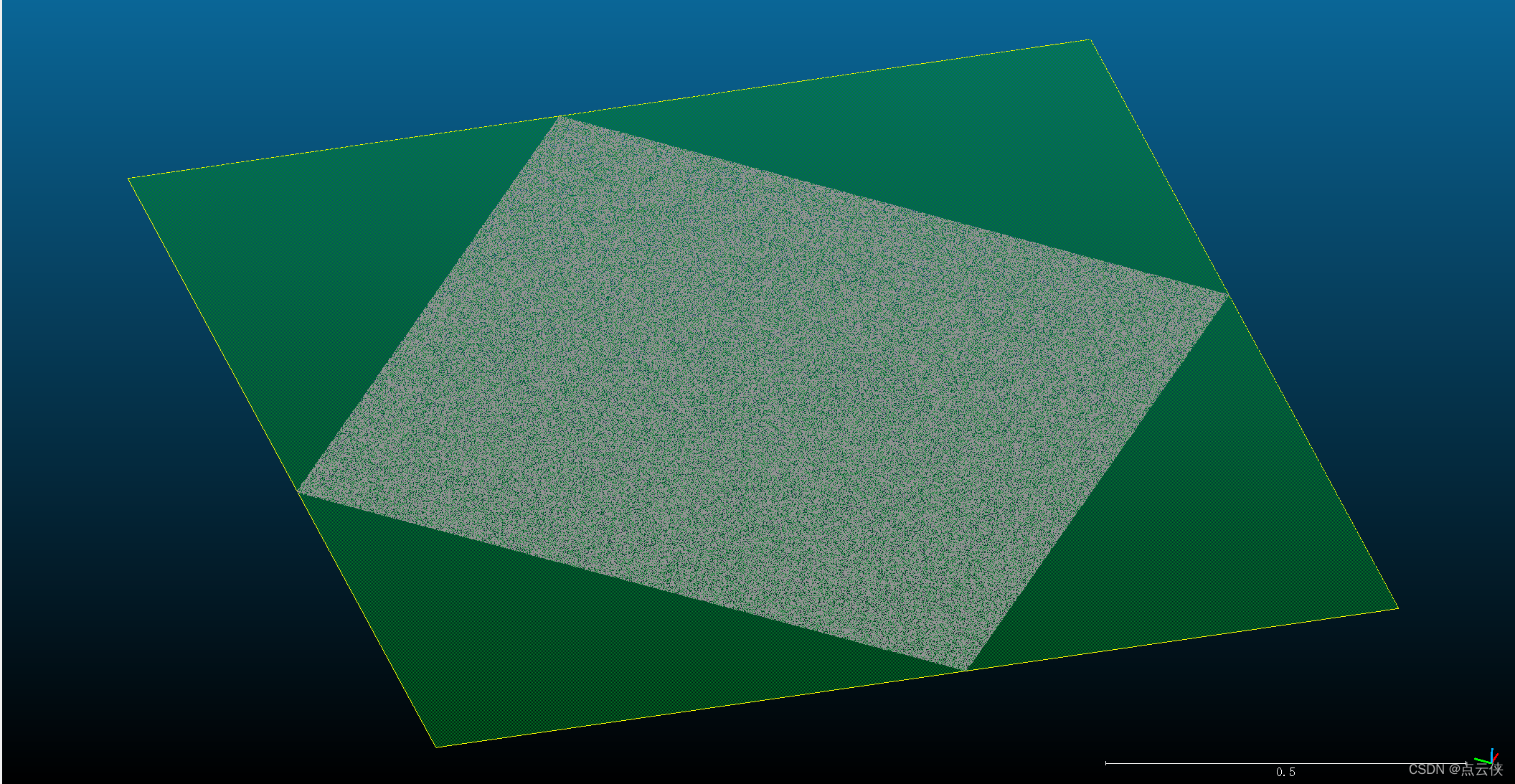
在控制台中,将输出以下信息:
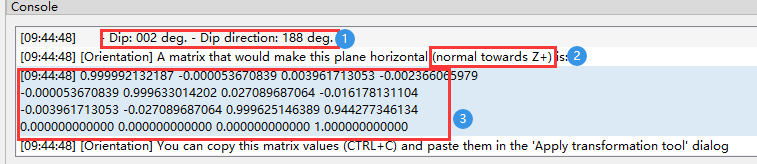
- 平面拟合的RMSE
- 平面法向量(法向方向默认为指向Z坐标轴的正方向)
- 倾角和倾角方向
- 一个能够使拟合平面调整为水平的4x4变换矩阵
注意:
- 拟合出的平面会被添加到DB树中,作为点云的子节点
- 拟合出来的是一种“三角网格”。因此,可以使用
Tools > Distances > Cloud/Mesh dist计算它们之间的距离
4.完整操作

5.相关代码
[1] PCL 最小二乘平面拟合(SVD法)
[2] PCL 使用RANSAC拟合平面
[3] PCL RANSAC分割多个平面
[4] PCL 中实现平面模型分割
[5] Open3D 最小二乘拟合平面(SVD法)
[6] Open3D——RANSAC三维点云平面拟合
[7] Open3D 使用RANSAC分割平面
[8] matlab RANSAC拟合平面
[9] matlab 最小二乘拟合平面(SVD法)