
第三节 PBN离场保护区的绘制
飞行程序设计软件实践
一、软件准备与任务分析
软件工具:中望CAD、风标设计2023【社区版】。

下载中望CAD对应的插件(WindSpiral2023中望版.dll),使用netload命令加载插件。插件加载后会自动打开功能导航窗口,也可以通过wstools命令再次打开这个导航窗口。
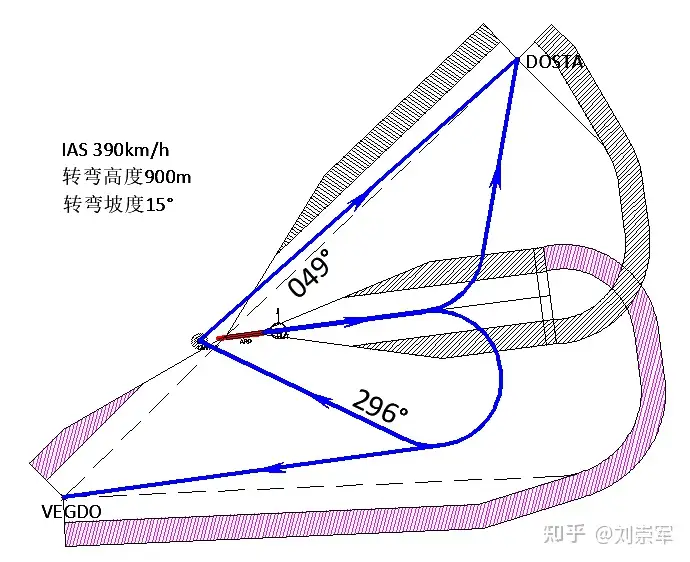
今天的任务是在基础数据文件之上,绘制下图所示RWY08 PBN离场保护区。
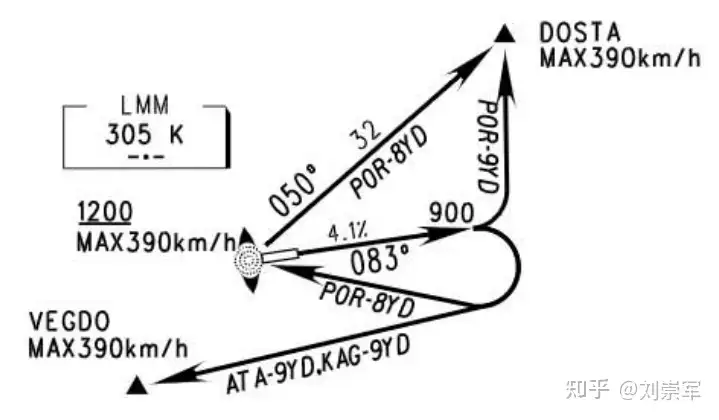
如果只看航图的这一部分,看着与传统程序几乎没有差别。如果往更大的范围去看,则可以找到旁切转弯航路点的图符,并且可以看到RNP1、RNAV1导航规范的相关要求。
想要准确掌握PBN程序的飞行要求,是需要查看编码表的。
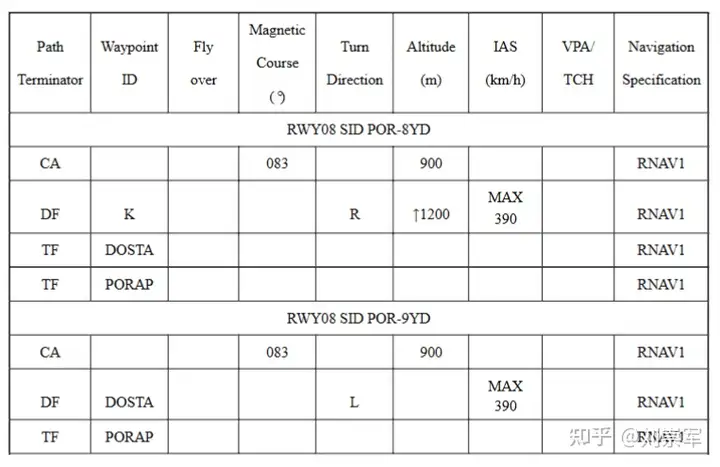
从上图中以看到,在离场初始段使用了CA编码,沿指定航迹(磁方向083°)爬升到900米高度(航图中标注有4.1%离场梯度)。转弯后直飞(DF)下一航路点。
导航台K的作用是一个旁切航路点,旁切转弯最大转弯角度应小于120°,从航图中看,这里的转弯角度似乎有点过大,绘制完保护区后,再来看看这个问题。
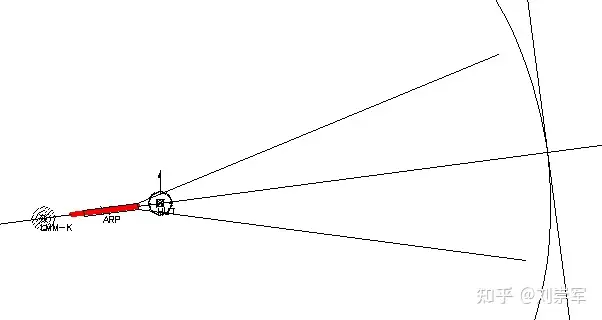
二、直线段保护区的绘制
PBN离场程序初始段的保护区与传统程序从理念上是相同的,对于定高转弯,都要求最早转弯位置是跑道入口后600米。DER之外初始的半宽为300米,两侧各外扩15°。这部分内容可以根据我们之前的经验快速的绘制出来。
已知RWY08跑道末端(DER)的高度为26.7米,转弯高度900米,梯度4.1%。那么转弯点距DER的距离等于(900-26.7-5)/4.1%=21178m。离场航空器在DER位置处时,默认至少获得5米的爬升高度,在精确计算时,这个5米不能省略。
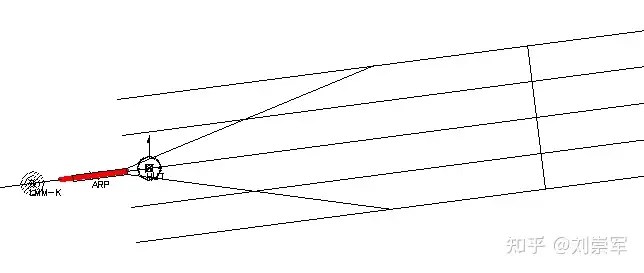
PBN离场程序与传统程序不同的地方在于,PBN导航有精度上的要求,体现在保护区中就是有特定的宽度,保护区到达该宽度以后就不再扩张。对于RNP1、RNAV1、RNAV2规范来说,在离场15nm以内,保护区半宽都是2nm。
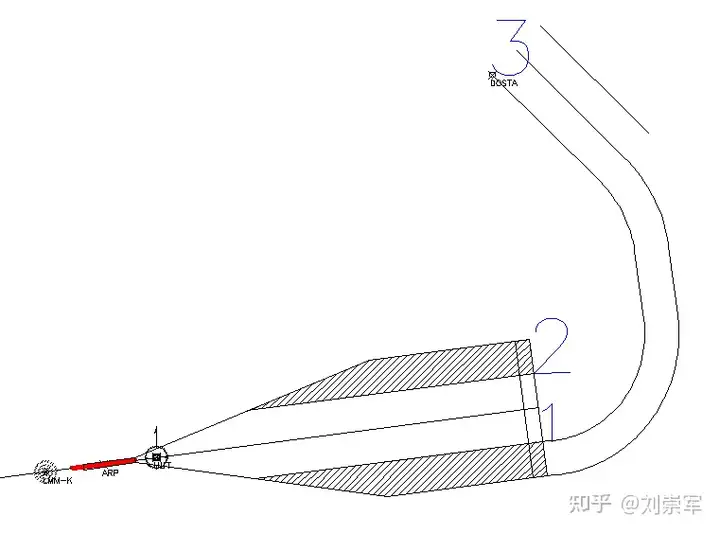
在离场直线段保护区中增加2nm的侧边线,得到下面的效果。
同样的,在转弯位置点之后,需要再增加6秒钟的飞行技术误差。
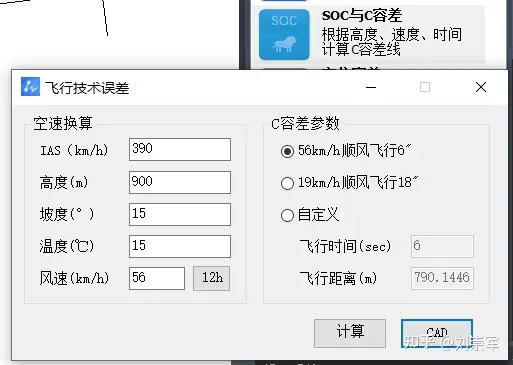
点击“SOC与C容差”菜单,打开飞行技术误差窗口,输入相关参数。离场转弯速度390km/h,坡度15°,风速56km/h。点击CAD按钮,指定C容差的起点和离场方向,得到最晚C容差线。
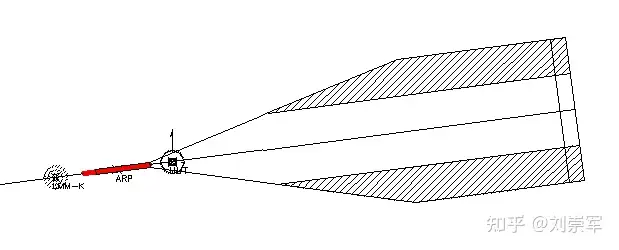
修剪多余的线条,完成PBN离场直线段保护区的绘制。
三、转弯区的绘制
PBN离场转弯段的风螺旋是从主区边界最晚点开始绘制。
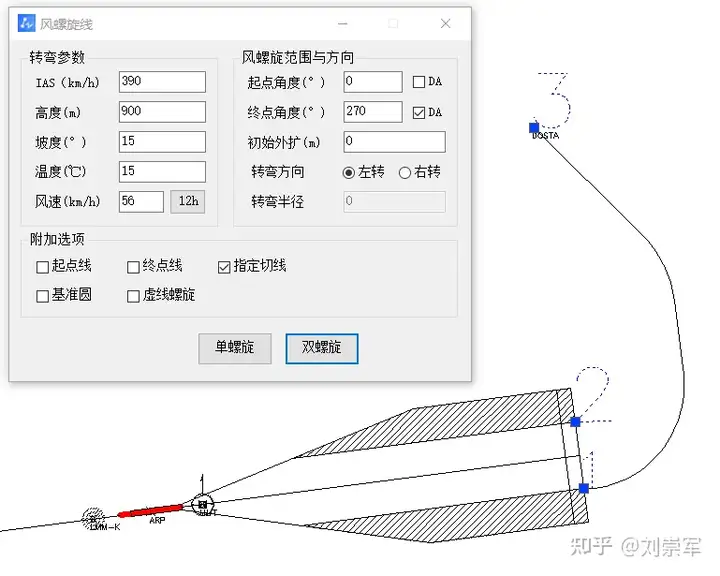
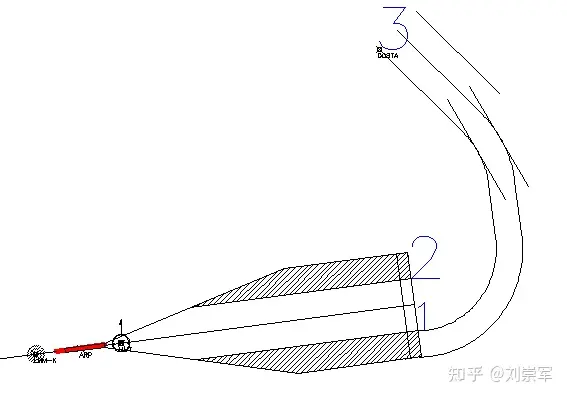
在风螺旋线窗口中,输入转弯参数,指定转弯方向,选中“指定切线”。使用双螺旋功能,依次点击C容差线上的主区边界点1、2,再点击下一航路点3,得到转弯段的主区边界线。
将绘制出的主区边界线外扩1852米,将航段终点的线段继续外扩1852米,得到下面的效果。
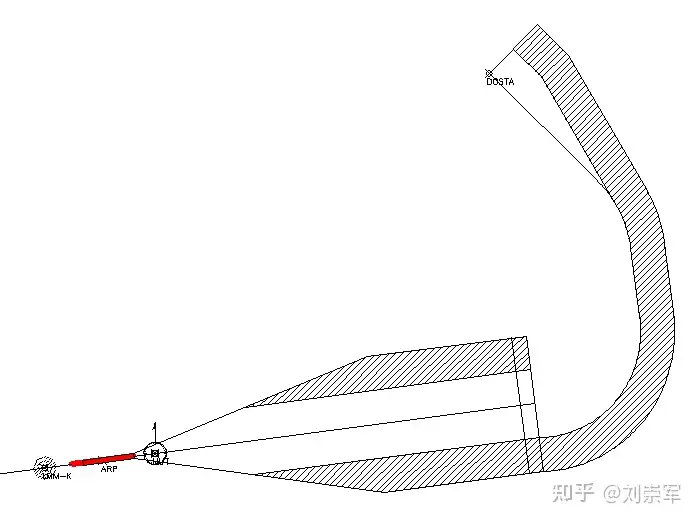
将航段终点的线段(可以看作是风螺旋的切线)复制一份,向外旋转15°,与风螺旋重新相切,得到下面的效果。
由于我们需要绘制的是DF航段保护区,因此,需要按照DF保护区的规则对以上的线段进行修剪,得到如下的最终效果。
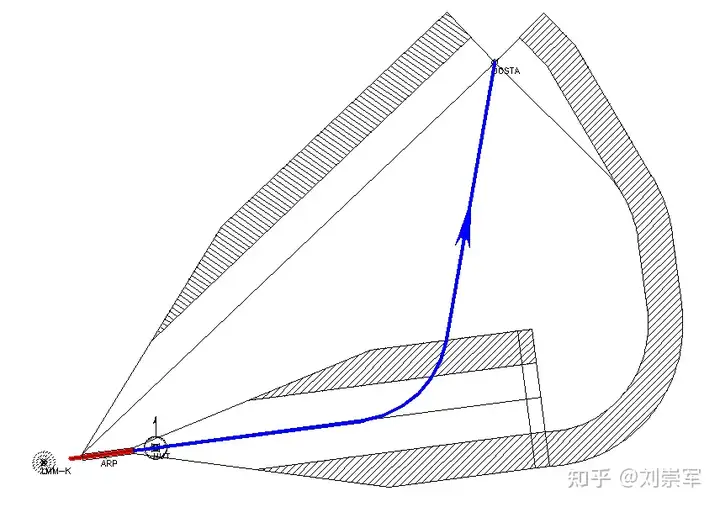
对定高转弯补充一个最早转弯保护区,再绘制一个7%平均离场梯度的标称航迹,保护区绘制就完成了。
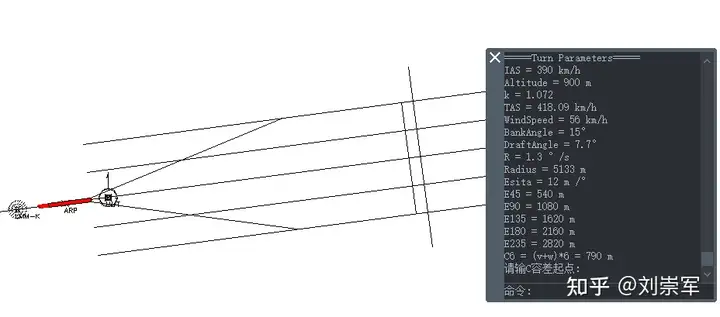
关于转弯区参数,插件中提供了xinfo命令,输入该命令,点击风螺旋线,可以在命令窗口中显示相关的转弯参数。
四、补充讨论
开始的时候,我们提到了右转飞向指点标台K的飞行路径,过K台后右转飞向DOSTA点。根据平均离场航迹的角度来看,两个航段之间夹角是113°,还算是在规范范围之内,非必要不建议这样去设计旁切转弯。
过K台的保护区属于旁切转弯,这个话题留到后面再来介绍。
很久没有手绘PBN保护区了,在风螺旋线插件的加持下,手绘也并不算是太复杂的事情。未来计划社区版插件继续保持免费政策,欢迎大家下载使用,提供改进意见。
插件下载地址:Gitee网站
相关文章
- Unable to start the daemon process
- docker高级篇第二章-分布式存储之实战案例:3主3从redis集群扩容配置
- 解决net不是此命令的问题
- 在多分类任务实验中用torch.nn实现dropout
- 在多分类任务实验中手动实现实现dropout
- Ubuntu 20.04 使用参考博客
- 多分类任务中不同隐藏单元个数对实验结果的影响
- 多分类任务中不同隐藏层层数对实验结果的影响
- 利用torch.nn实现前馈神经网络解决 多分类 任务使用至少三种不同的激活函数
- 利用torch.nn实现前馈神经网络解决 二分类 任务
- torch.nn.BCELoss用法
- 利用torch.nn实现前馈神经网络解决 多分类 任务
- R7000P Ubuntu20.04 安装 Realtek 8852 无线网卡驱动
- 邻接矩阵的相乘的意义
- 分类问题中评价指标
- 矩阵求导
- Jupyter Notebook设置主题
- 逻辑回归从零开始实现
- Pytorch 实现多层感知机
- 逻辑回归torch.nn实现