
第五节 精密进近保护区的绘制
飞行程序设计软件实践
一、软件工具与任务分析
软件工具:中望CAD,风标设计2023插件。
国产中望CAD2023下载后可全功能试用一个月,超出试用期后,可继续使用,图块在1000个以内时功能不受影响。如果图块超出1000,可以将多个图块组成一个组,这样图块数量又可以降下来。建议有条件的用户支持一下国产正版软件,临时使用或初学的用户,可以多尝试一下国产品牌。
前面的练习中,我们已经完成了离场、进场保护区的绘制,接下来该进入进近阶段的保护区绘制了。
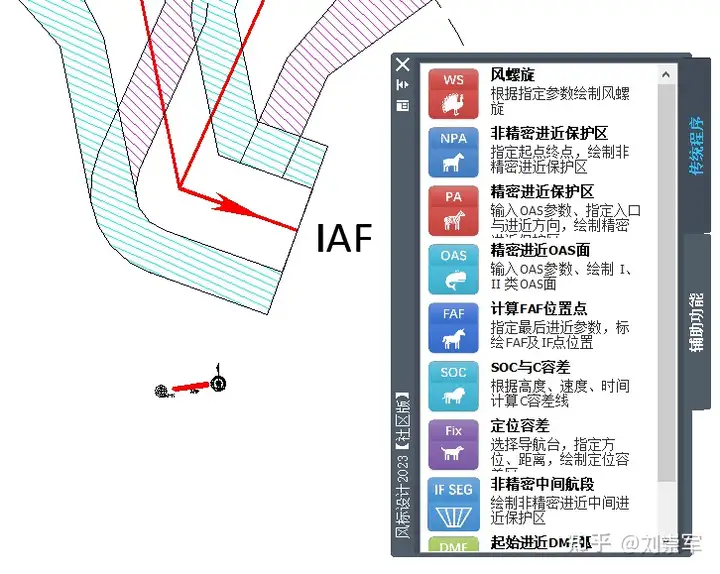
进近阶段分为起始进近(从跑道周边的位置点或导航台IAF到达跑道延长线方向的位置点IF)、中间进近(从跑道延长线方向的位置点IF到达开始下降的一个位置点FAF)、最后进近(从开始下降的位置FAF到达开始决定是否复飞的位置点MAPt)以及复飞航段(从决定复飞的位置开始,爬升到等待位置或IAF点)
起始进近航段按照飞行轨迹的形状,又可以细分为直线进近、DME弧进近、直角航线、基线转弯、程序转弯、U型、S型等程序。这些话题每个都可以单独的来做个练习,等到近期的大练习做完以后再来展开讨论。
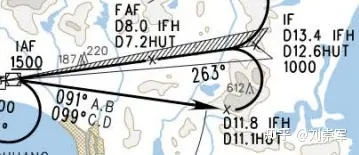
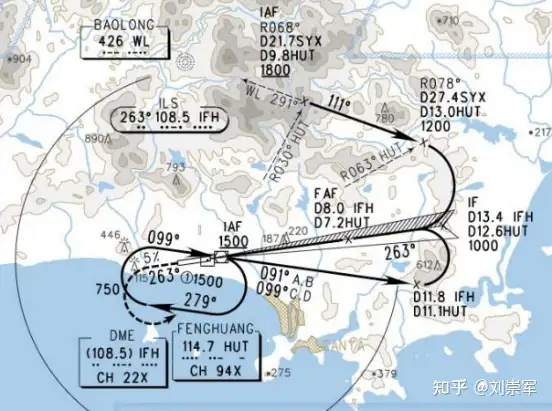
上面是一张非常典型的仪表进近程序图,其中包含了从IAF点出发,飞至D11.1HUT点,再飞至IF D12.6HUT的一段程序,该段程序就属于起始进近航段,这种飞行方式有一个专有的名称叫做基线转弯程序。
到达IF点之后,开始按照航向台的引导继续前进,在FAF位置截获下滑台的信号,按照下滑信号的引导开始下降,这个下降过程就称为精密进近。今天要实现的保护区内容就代表了下降过程中飞机可能出现的活动范围。
二、精密进近参数的获取
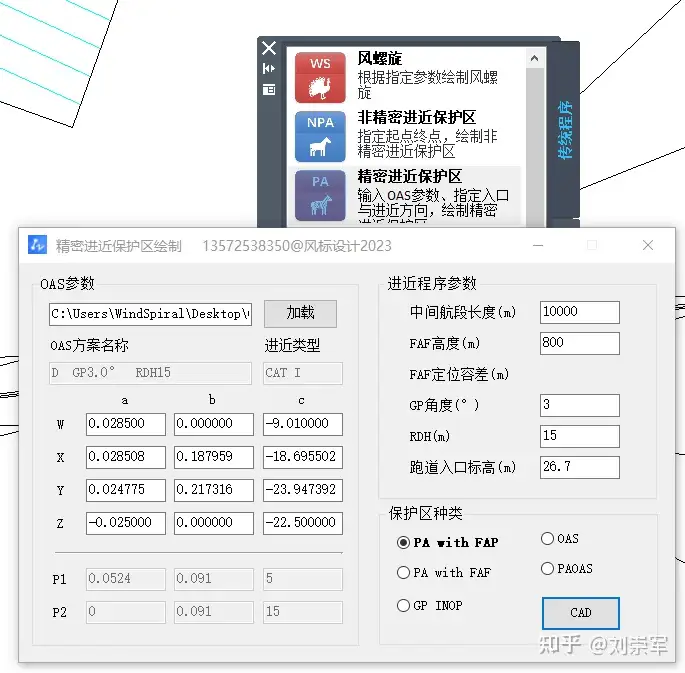
绘制精密进近保护区最关键的内容是得到精密进近OAS参数。常规的办法是通过ICAO OAS软件来获得相关参数,目前我们已经实现该软件的国产化,欢迎大家对照使用。在风标设计2023的插件包中,找到WsOasPara.exe文件,打开以后是下面的窗口界面。
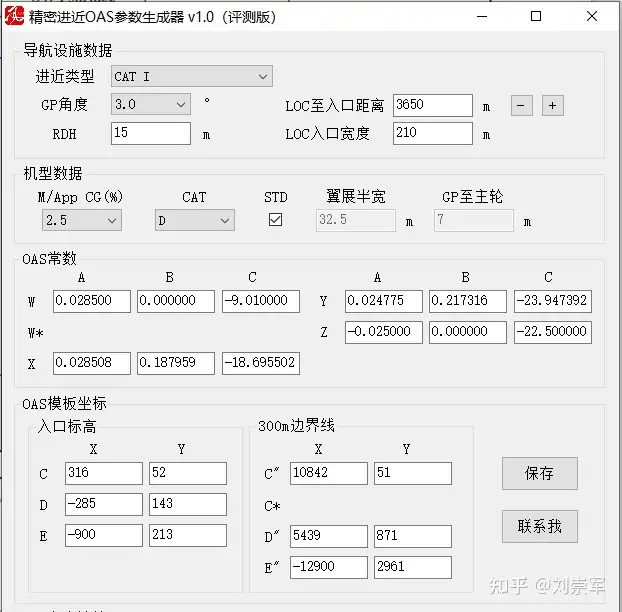
航向台(LOC)至入口距离这项数据需要在机场资料中进行查找,通常航向台位于跑道外280米左右。我们练习使用的这个机场,航向台距跑道末端250米,跑道长度3400米,因此,航向台至跑道入口的距离就是3650米。
OAS参数软件中LOC至入口距离这项数据,每当距离值是200米的整数倍时,相关参数是ICAO公布的标准参数。其它距离值条件下,因为修正的计算精度有差异,与ICAO OAS软件的计算结果存在少量差异。
参数窗口中的其余参数按照进近图中的内容进行填写即可,填写完成后,点击保存得到相关的OAS参数输出文件。最新版本中,采用如下的OAS参数格式。
Name, A GP3.0° RDH15
Cat, CAT I
W , 0.028500,0.000000,-8.010000
Ws, 0.000000,0.000000,0.000000
X , 0.027986,0.184514,-16.910000
Y , 0.024252,0.212726,-21.780000
Z , -0.025000,0.000000,-22.500000
前期版本中用“:”号分隔名称与数据,在新版本中会导致软件出错,请将“:”替换为“,”号,或者使用新版软件重新生成OAS参数。
精密进近保护区严格来说与机型是有直接关系的,不同的机型保护区参数会有变化,因此,保护区形状会有少量差异。通过OAS参数生成软件可以发现,A、B类机型使用了相同的参数,C、D类是另一组参数,DL宽体机使用的另外的参数。D类机型的保护区通常限制更严格,因此,多数时候使用D类机型的OAS参数来绘制精密进近保护区。
三、程序参数的选择
打开CAD文件,加载风标2023插件。找到跑道,使用rcl命令,添加跑道中线延长线。
查看进近航图的剖面图部分,找到以下数据。
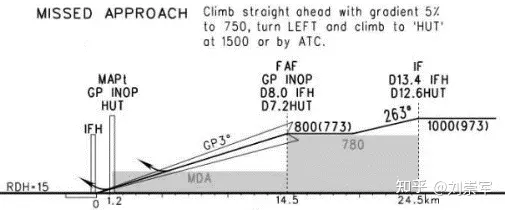
IF至FAF距离10km,下滑角(GP)3°,飞机过跑道入口的高(RDH)15m,入口标高26.7m,FAF的高度是800m。
打开插件中的精密进近保护区窗口,加载前一步生成的OAS参数文件,在进近程序参数框中,依次输入航图中查找到的数据。
点击CAD按钮,根据提示,先点击跑道入口,再点击进近方向上的位置点,软件会自动绘制出精密进近FAP方式下的直线段保护区。“助力行业发展,推动技术进步”是一句广告,专业版里没有这句话。如果文字显示为“????”,尝试将字体样式改为Legend即可。
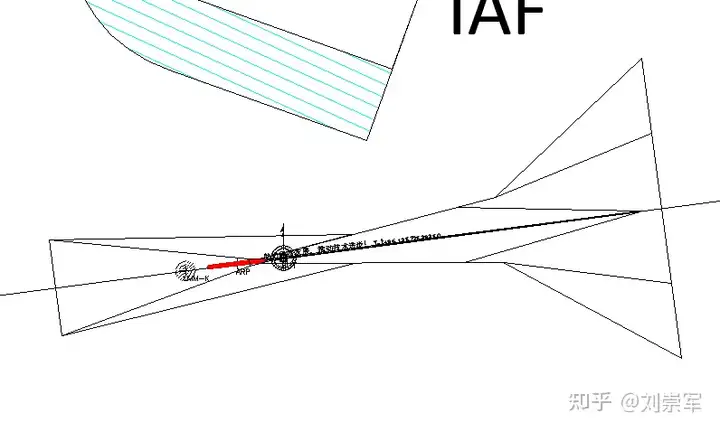
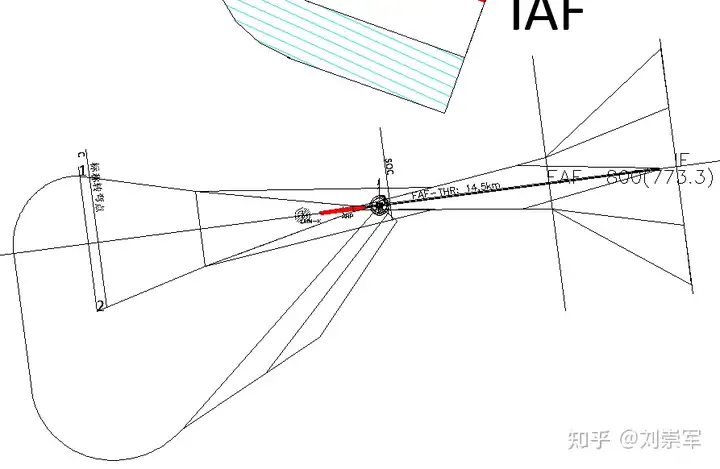
通过“计算FAF位置点”功能,可以对上面的绘图进行检查。
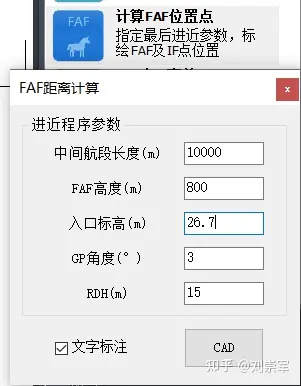
输入参数,点击跑道入口,再在进近方向上点击一下,得到FAF及IF点的位置标识。
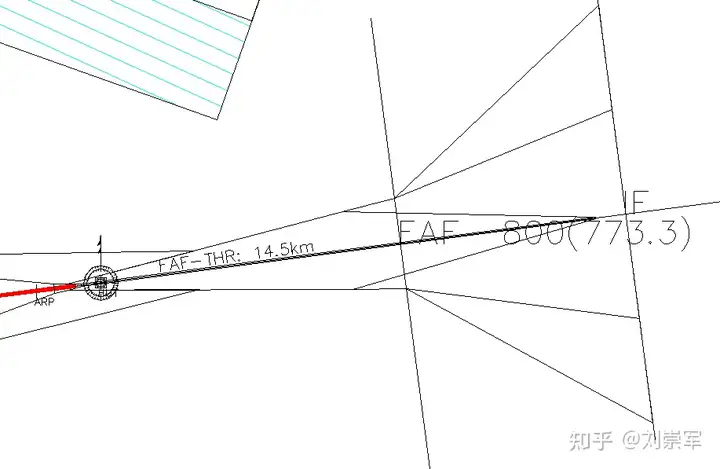
通过这个检查可以看到OAS面的绘制是比较准确的。
前期版本中,FAF高度使用的是场压高,新版本中已更新为海拔高度,在计算时与跑道入口高度有直接的换算关系。
四、精密进近复飞转弯保护区的绘制
从精密进近运行标准的制定来看,不同的机型对安全余度的需求是不同,在规范中用高度损失HL来表示。A、B、C、D类机型最基础的高度损失分别为40m至49m。最终的运行标准就是在障碍物高度的基础之上加上高度损失得到相应的DA(DH)。
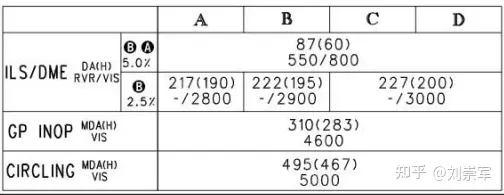
我们以D类机型2.5%复飞梯度的运行标准为例,来绘制一下精密进近复飞航段的保护区。
首先,涉及到复飞保护区需要计算一个起始爬升点(SOC),这是一个用来表示航空器从下降状态开始转为爬升状态的位置点。
传统精密进近SOC的计算采用(DH-HL)/下降梯度-900来得到。
Xsoc = (200-49)/0.0524-900 = 1982m
说明当航空器在跑道入口之上200米开始决定复飞时,在跑道入口外1982米的地方开始进入到爬升状态,该位置处的计算高度最低为151米。
根据航图中对复飞程序的描述,以5%复飞梯度直线爬升到750米,然后左转飞向HUT导航台,5%复飞梯度对应的运行标准为DH 60米。
我们采用的是2.5%复飞梯度,对应的运行标准是DH 200米。SOC点的计算高度为200-49 = 151米。转弯点与SOC之间的距离为(750-151-26.7)/2.5% = 22892m,也就是说,航空器需要飞行约22.9km才可以爬升到海拔750米高度。
在跑道延长线上标记出SOC的位置,从SOC点标记半径22892m的圆,可以发现,复飞转弯点已经位于OAS面的Z面300米边界线之外。对于这片区域,外边界按照跑道中线15°外扩来绘制。使用外扩线功能,标绘出外扩线后,将外扩线移动到OAS面的边界点上形成直线段保护区的外边界。
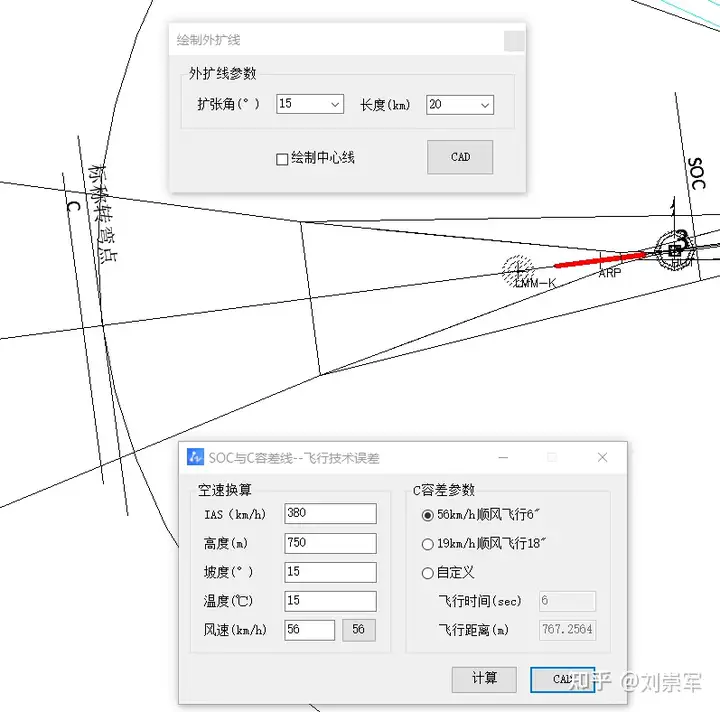
打开SOC与C容差菜单,在“飞行技术误差”窗口中选择56km/h顺风飞行6”,绘制C容差线,C容差线代表了复飞转弯的最晚位置。
打开风螺旋线窗口,输入转弯参数,复飞转弯时坡度为15°,风速56km/h。
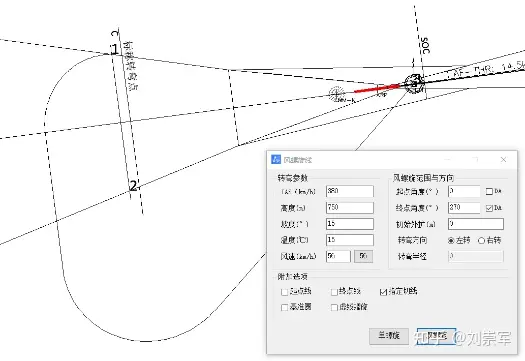
转弯方向选择“左转”,“指定切线”,使用双螺旋功能,依次点击C容差线上的1、2点,再点击导航台,得到定高转弯保护区的转弯外边界线。
点击“非精密进近保护区”菜单,打开传统导航台保护区窗口,为转弯外边界飞向导航台的这一部分航段添加导航台引导的保护区。
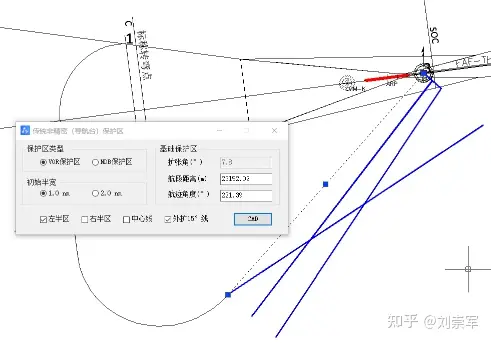
修剪多余线条,完成保护区的绘制。
如果说这里的画法还有遗漏,那应该是定高转弯中最常见的最早转弯位置的问题,比如从SOC最早位置绘制转弯风螺旋,会多出一块阴影区来。
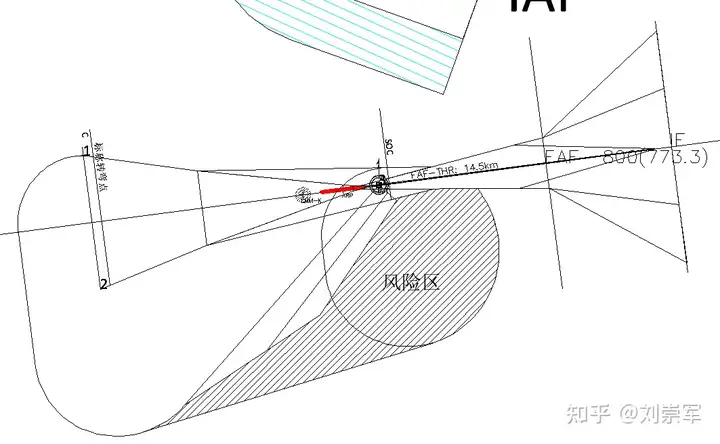
当航空器进入到图中的阴影区时,再想转弯回到导航台上空是比较困难的。但从评估的角度来说,应对这部分区域的越障高度进行检查,因为这仍然是理论上可能会出现的区域。
今天的内容就是这些,祝大家新年快乐!
插件下载地址:Gitee网站
相关文章
- 从Thread.start()方法看Thread源码,多次start一个线程会怎么样
- Thread类源码剖析
- zookeeper(zkCli)命令概览
- 终极锁实战:单JVM锁+分布式锁
- AbstractQueuedSynchronizer AQS框架源码剖析
- 在openjdk8下看Unsafe源码
- eclipse卡死在search for main types 20 files to index
- 多线程并发执行任务,取结果归集。终极总结:Future、FutureTask、CompletionService、CompletableFuture
- 同步中的四种锁synchronized、ReentrantLock、ReentrantReadWriteLock、StampedLock
- 根据CPU核心数确定线程池并发线程数
- 分布式共识算法 (二) Paxos算法
- secureCRT关闭连接自动关闭tomcat服务
- apache的MultipartEntityBuilder文件上传
- JDK8-废弃永久代(PermGen)迎来元空间(Metaspace)
- jdk源码剖析四:JDK1.7升级1.8 HashMap原理的变化
- jdk源码剖析二: 对象内存布局、synchronized终极原理
- jdk源码剖析一:OpenJDK-Hotspot源码包目录结构
- JDK8-十大新特性-附demo
- 设置火狐新建标签页--终极方案,17年最火狐亲自测试可行!
- jdk源码剖析三:锁Synchronized