
论文解读(BGRL)《Large-Scale Representation Learning on Graphs via Bootstrapping》
论文信息
论文标题:Large-Scale Representation Learning on Graphs via Bootstrapping
论文作者:Shantanu Thakoor, Corentin Tallec, Mohammad Gheshlaghi Azar, Rémi Munos, Petar Veličković, Michal Valko
论文来源:2021, ICLR
论文地址:download
论文代码:download
早先版本名字叫《Bootstrapped Representation Learning on Graphs》
1 Introduction
研究目的:对比学习中不适用负样本。
本文贡献:
-
- 对图比学习不使用负样本
2 Method
2.1 Framework
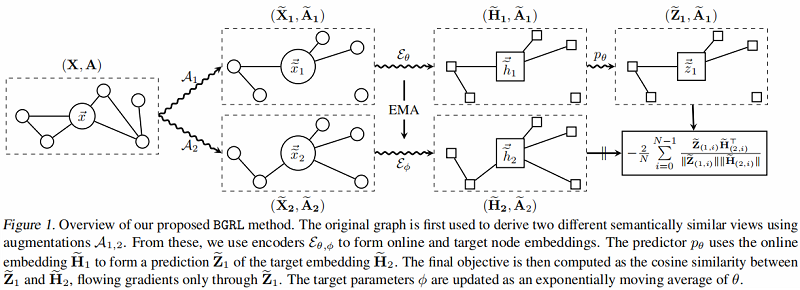
上面是 online network,下面是 target network 。
步骤:
-
- 步骤一:分别应用随机图增强函数 $\mathcal{A}_{1}$ 和 $\mathcal{A}_{2}$,产生 $G$ 的两个视图:$\mathbf{G}_{1}= \left(\widetilde{\mathbf{X}}_{1}, \widetilde{\mathbf{A}}_{1}\right)$ 和 $\mathbf{G}_{2}=\left(\widetilde{\mathbf{X}}_{2}, \widetilde{\mathbf{A}}_{2}\right) $;
- 步骤二:在线编码器从其增广图中生成一个在线表示 $\widetilde{\mathbf{H}}_{1}:=\mathcal{E}_{\theta}\left(\widetilde{\mathbf{X}}_{1}, \widetilde{\mathbf{A}}_{1}\right)$;目标编码器从其增广图生成目标表示 $\widetilde{\mathbf{H}}_{2}:=\mathcal{E}_{\phi}\left(\widetilde{\mathbf{X}}_{2}, \widetilde{\mathbf{A}}_{2}\right) $;
- 步骤三:在线表示被输入到一个预测器 $p_{\theta}$ 中,该预测器 $p_{\theta}$ 输出对目标表示的预测 $\widetilde{\mathbf{Z}}_{1}:= p_{\theta}\left(\widetilde{\mathbf{H}}_{1}, \widetilde{\mathbf{A}}_{1}\right)$,除非另有说明,预测器在节点级别工作,不考虑图信息(仅在 $\widetilde{\mathbf{H}}_{1}$ 上操作,而不是 $\widetilde{\mathbf{A}}_{1}$)。
2.2 BGRL Update Param
更新 $\theta$
在线参数 $\theta$,通过余弦相似度的梯度,使预测的目标表示 $\mathbf{Z}_{1}$ 更接近每个节点的真实目标表示 $\widetilde{\mathbf{H}}_{2}$。
$\ell(\theta, \phi)=-\frac{2}{N} \sum\limits _{i=0}^{N-1} {\large \frac{\widetilde{\mathbf{Z}}_{(1, i)} \widetilde{\mathbf{H}}_{(2, i)}^{\top}}{\left\|\widetilde{\mathbf{Z}}_{(1, i)}\right\|\left\|\widetilde{\mathbf{H}}_{(2, i)}\right\|}} \quad\quad\quad(1)$
$\theta$ 的更新公式:
$\theta \leftarrow \operatorname{optimize}\left(\theta, \eta, \partial_{\theta} \ell(\theta, \phi)\right)\quad\quad\quad(2)$
其中 $ \eta $ 是学习速率,最终更新仅从目标对 $\theta$ 的梯度计算,使用优化方法如 SGD 或 Adam 等方法。在实践中,
我们对称了训练,也通过使用第二个视图的在线表示来预测第一个视图的目标表示。
更新 $\phi$
目标参数 $\phi$ 被更新为在线参数 $\theta$ 的指数移动平均数,即:
$\phi \leftarrow \tau \phi+(1-\tau) \theta\quad\quad\quad(3)$
其中 $\tau$ 是控制 $\phi$ 与 $ \theta$ 的距离的衰减速率。
只有在线参数被更新用来减少这种损失,而目标参数遵循不同的目标函数。根据经验,与BYOL类似,BGRL不会崩溃为平凡解,而 $\ell(\theta, \phi)$ 也不收敛于 $0$ 。
3 Experiment
数据集
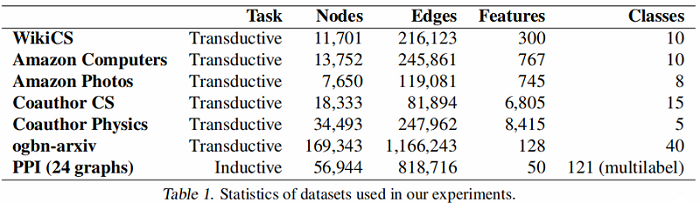
数据集划分:
-
- WikiCS: 20 canonical train/valid/test splits
- Amazon Computers, Amazon Photos——train/validation/test—10/10/80%
- Coauthor CS, Coauthor Physics——train/validation/test—10/10/80%
直推式学习——基线实验
图编码器采用 $\text{GCN}$ Encoder 。
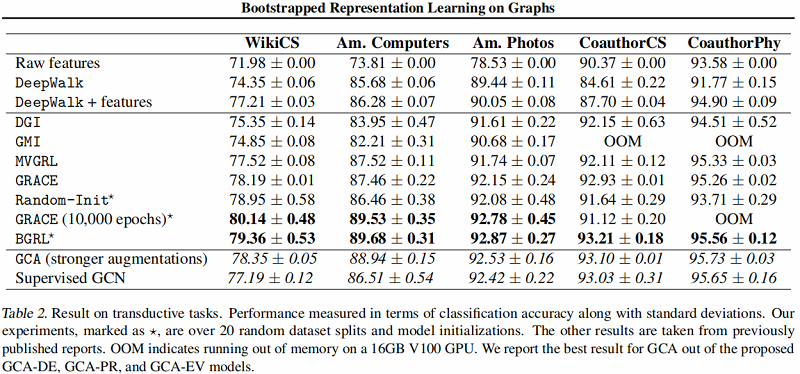
大图上的直推式学习——基线实验
结果:

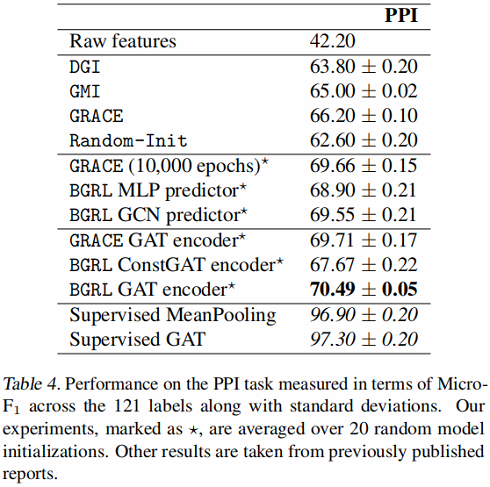
归纳式学习——基线实验
编码器采用 GraphSAGE-GCN (平均池化)和 GAT 。
结果:
4 Conclusion
使用了一种简单的不需要负样本的对比学习框架。
修改历史
2021-04-14 创建文章
2022-06-14 精读
相关文章
- 开发H5程序或者小程序的时候,后端Web API项目在IISExpress调试中使用IP地址,便于开发调试
- 基于SqlSugar的开发框架循序渐进介绍(10)-- 利用axios组件的封装,实现对后端API数据的访问和基类的统一封装处理
- 使用uView UI+UniApp开发微信小程序--微信授权绑定和一键登录系统
- 使用uView UI+UniApp开发微信小程序--判断用户是否登录并跳转
- 使用uView UI+UniApp开发微信小程序
- 循序渐进BootstrapVue,开发公司门户网站(6)--- 门户网站后端内容管理
- 循序渐进BootstrapVue,开发公司门户网站(5)--- 使用实际数据接口代替本地Mock数据
- 循序渐进BootstrapVue,开发公司门户网站(4)--- 使用b-carousel-slide组件实现图片轮播以及vue-awesome-swiper实现图片滑动展示
- 循序渐进BootstrapVue,开发公司门户网站(3)--- 结合邮件发送,收集用户反馈信息
- 在Bootstrap开发框架基础上增加WebApi+Vue&Element的前端
- 在Bootstrap开发框架中使用Grid++报表
- 基于Metronic的Bootstrap开发框架--资产编码打印处理
- 基于Metronic的Bootstrap开发框架经验总结(14)--条码和二维码的生成及打印处理
- 基于Metronic的Bootstrap开发框架经验总结(10)--优化Bootstrap图标管理
- 基于Metronic的Bootstrap开发框架经验总结(7)--数据的导入、导出及附件的查看处理
- 基于Metronic的Bootstrap开发框架经验总结(6)--对话框及提示框的处理和优化
- 基于Metronic的Bootstrap开发框架经验总结(5)--Bootstrap文件上传插件File Input的使用
- 基于Metronic的Bootstrap开发框架经验总结(4)--Bootstrap图标的提取和利用
- 基于Metronic的Bootstrap开发框架经验总结(3)--下拉列表Select2插件的使用
- 基于Metronic的Bootstrap开发框架经验总结(1)-框架总览及菜单模块的处理