
YoloV7 标签匹配机 loss 计算详解
2023-04-18 12:38:14 时间
这是一篇 v7 后处理详解的文章
本篇文章主要对 YoloV7 的后处理进行详细讲解,YoloV7 除了结构上,对前后处理都进行了改进,其余包括 scheduler、optimizer 等与 YoloV6 都是保持一致的。而前处理中的多数 trick 也可以由其他,例如 X 中的数据增强方式替代。因此我们着重介绍后处理部分

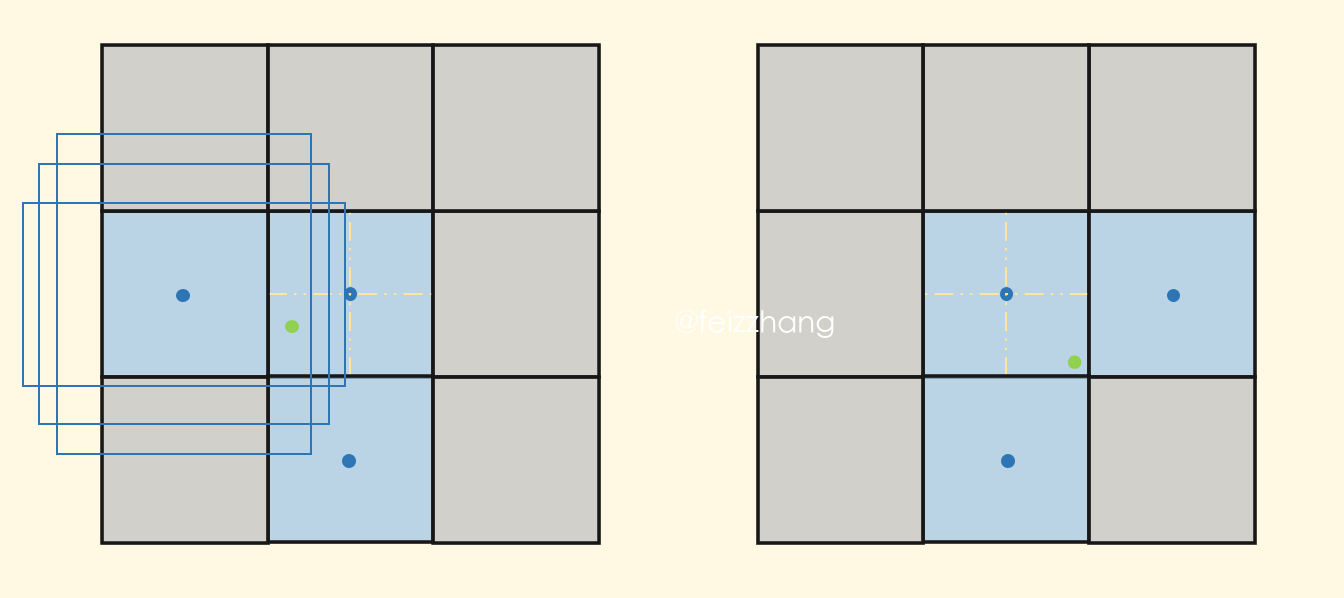
如上图所示,对于每一个网格,会被分为四个部分,绿色点是 GT 中心点,蓝色点是匹配给 GT 的正样本点。首先 GT 中心点所在的网格会被定义为正样本,然后根据中心点在网格的位置来找到另外两个正样本。比如在位置 1 是左上的点会被定义为其正样本,位置 2 是右上,位置 3 是左下,位置 4 是右下。
相关文章
- Hive调优 | HiveServer2 性能优化与GC优化
- 【2021GTC】NVIDIA Orin平台:用于高性能AI计算的可扩展和模块化架构
- 量子计算与从头药物设计
- 聊聊sql优化的15个小技巧
- 零拷贝实现原理与使用
- 机器学习获量子加速,AI研究范式或彻底改变
- 2040张图片训练出的ViT,准确率96.7%,连迁移性能都令人惊讶
- 雏鹰展翅|Oracle 单表分页查询优化
- Oracle 通过 SQL 语句查看数据库服务器 IP 地址
- 量化CTA:Deep Momentum Network的细节思考
- MySQL only_full_group_by 1055 报错的三种解决方案,临时关闭有影响吗?
- EasyCVR启动后redis无法连接排查
- MIT开发Twist编程语言:专门解决量子计算数据纠缠问题
- 2022年,哪些科技趋势将持续改变世界?这里有一份来自百度研究院的预测
- 【Spark重点难点】你从未深入理解的RDD和关键角色
- Meta AI推出“杂食者”:一个模型搞定图像视频和3D数据的分类任务
- 带着问题读 TiDB 源码:Power BI Desktop 以 MySQL 驱动连接 TiDB 报错
- Android CameraX结合LibYUV和GPUImage自定义相机滤镜
- 直播预告 | 无线扩展、在线变更,揭秘TDSQL新敏态引擎核心技术
- 金融科技十大技术趋势出炉,这两项技术关注度飙升!