
【算法】跑ORB-SLAM3遇到的问题、解决方法、效果展示(环境:Ubuntu18.04+ROS melodic)
文章目录
一、./build.sh编译ORB-SLAM3出现的各种问题
1、问题:OpenCV > 4.4 not found
编译build.sh时报错:OpenCV > 4.4 not found
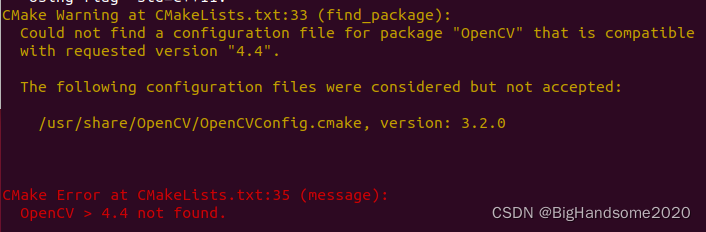
解决方法
(1)找到ORB_SLAM3文件夹下的CMakeList.txt 中的find_package(OpenCV 4.4)位置,修改为:
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules)
find_package(OpenCV 3 REQUIRED)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 4.4 not found.")
2、问题:error: ‘slots_reference’ was not declared in this scope
Pangolin最新版本导致的bug,报错error;如果跑ORB-SLAM2、ORB-SLAM3不要用最新版的Pangolin进行编译安装,会导致error: ‘slots_reference’ was not declared in this scope或者cannot findind Eigen3.cmake,我就是安装了最新版然后编译ORB-SLAM2库的时候报了一大堆错,改环境跟代码花了一天时间都没有搞定,最后发现是这个问题,欲哭无泪www
解决方法
1、卸载最新版Pangolin,进入Pangolin文件夹的build里边,执行
sudo make uninstall
2、安装Pangolin v0.5的版本。
安装链接:https://github.com/stevenlovegrove/Pangolin/tree/v0.5
3、安装步骤
cd Pangolin
mkdir build && cd build
cmake ..
cd ..
cmake --build .
sudo make install
参考链接:https://codingnote.cc/p/484790/
二、ORB-SLAM3 效果展示
1、编译./build.sh成功
2、发现源码里没有euroc_examples.sh文件
好不容易build.sh编译完要测数据了,然后发现源码里没有euroc_examples.sh,然而README里是这么说的:
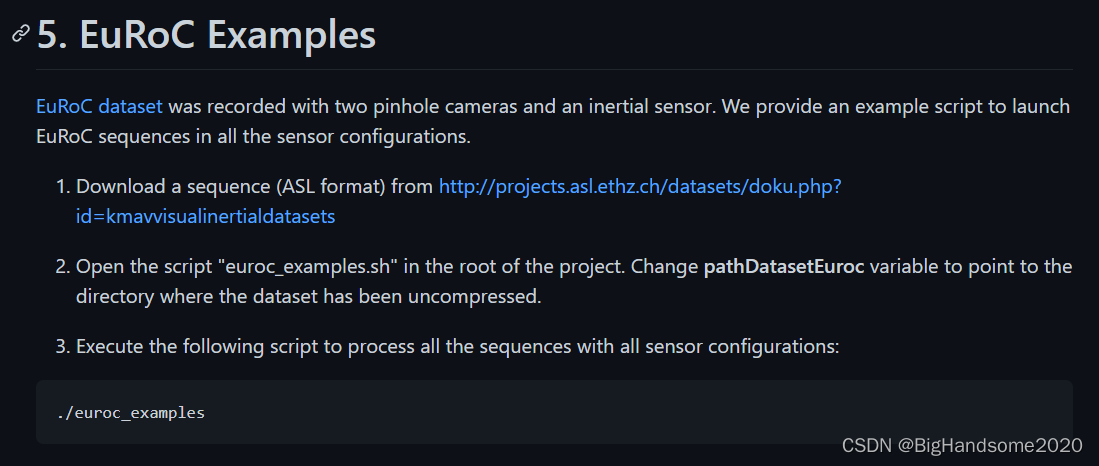
直接裂开,虚空examples,一查发现有同行说是新版的ORB-SLAM3库里没有了,于是赶紧找找有没有前辈下载下来了euroc_examples.sh这个文件,然后就找到了个github里头是有这个文件的,这个github还是ORB-SLAM3的详细注释版,以后要看懂代码的话少不了它,链接先放这了
https://github.com/electech6/ORB_SLAM3_detailed_comments
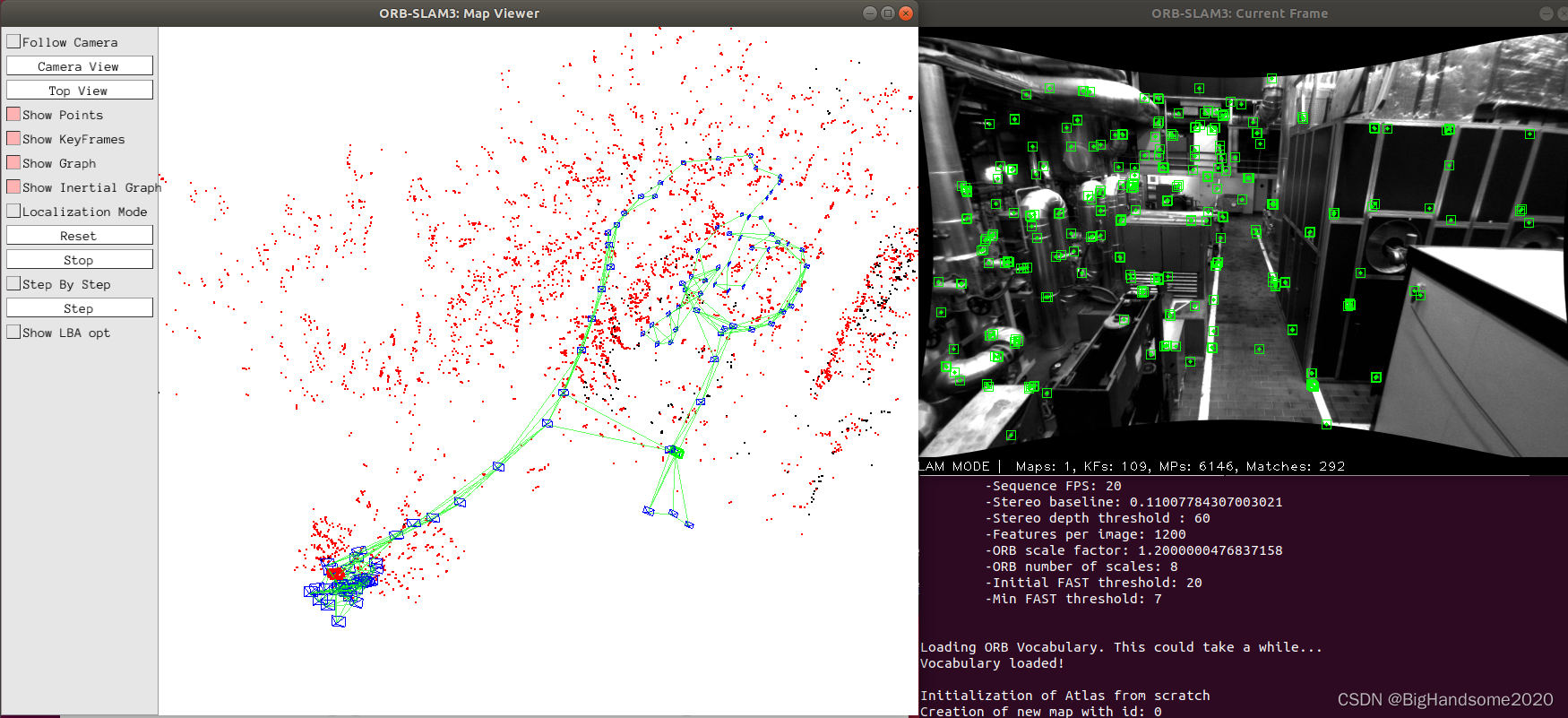
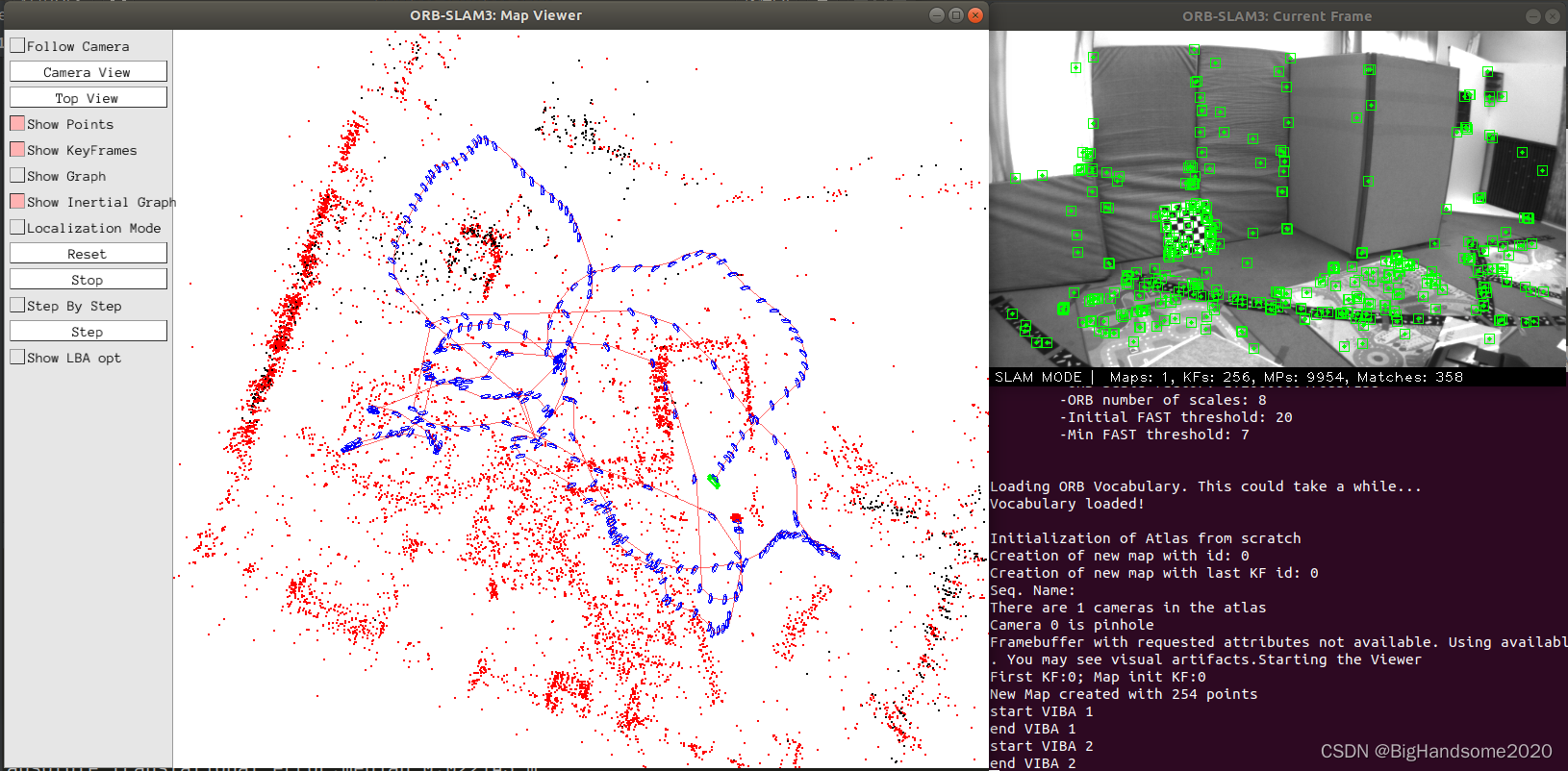
3、测试EuRoC数据集上的效果
(1)EuRoC数据集由两个针孔摄像头(pinhole)和一个惯性传感器(IMU)记录得到,以下只展示测试的部分视频序列的部分结果
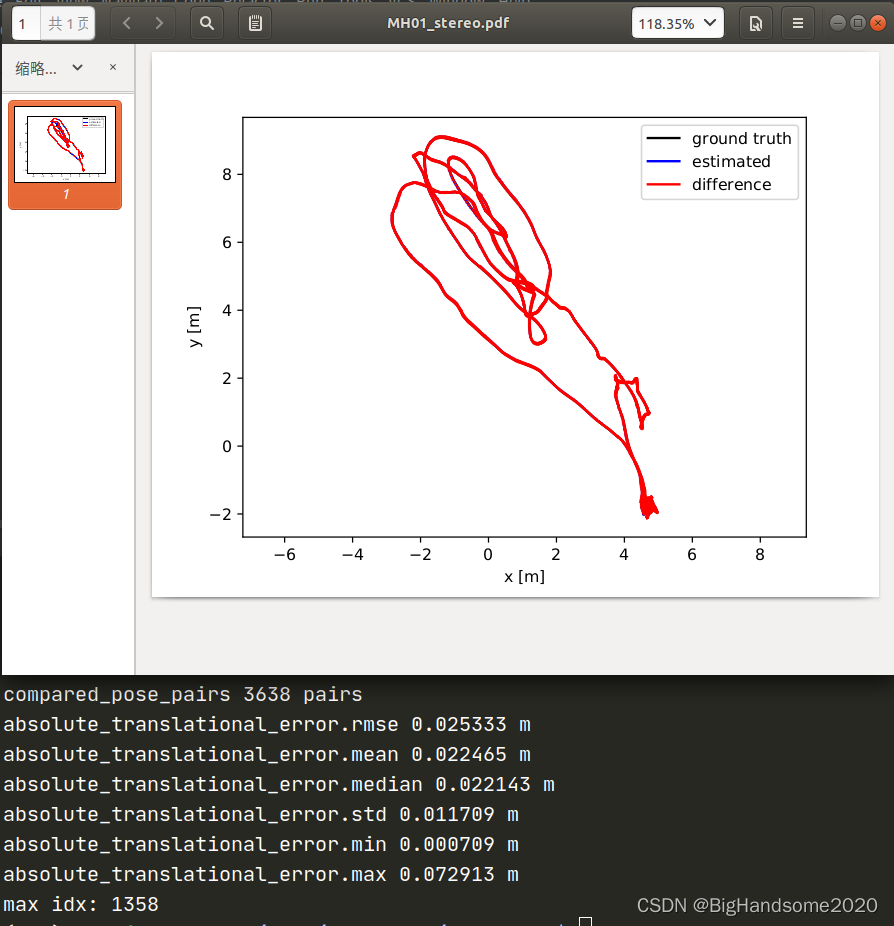
(2)视频序列:MH_01_easy
MH_01_easy 双目 效果
Eval命令行示例:
echo "Launching MH01 with Stereo sensor"
./Examples/Stereo/stereo_euroc ./Vocabulary/ORBvoc.txt ./Examples/Stereo/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Examples/Stereo/EuRoC_TimeStamps/MH01.txt dataset-MH01_stereo
echo "------------------------------------"
echo "Evaluation of MH01 trajectory with Stereo sensor"
python evaluation/evaluate_ate_scale.py evaluation/Ground_truth/EuRoC_left_cam/MH01_GT.txt f_dataset-MH01_stereo.txt --plot MH01_stereo.pdf
和GroundTruth轨迹对比的Eval结果:
absolute_translational_error.rmse 0.025333 m
absolute_translational_error.mean 0.022465 m
absolute_translational_error.median 0.022143 m
absolute_translational_error.std 0.011709 m
absolute_translational_error.min 0.000709 m
absolute_translational_error.max 0.072913 m
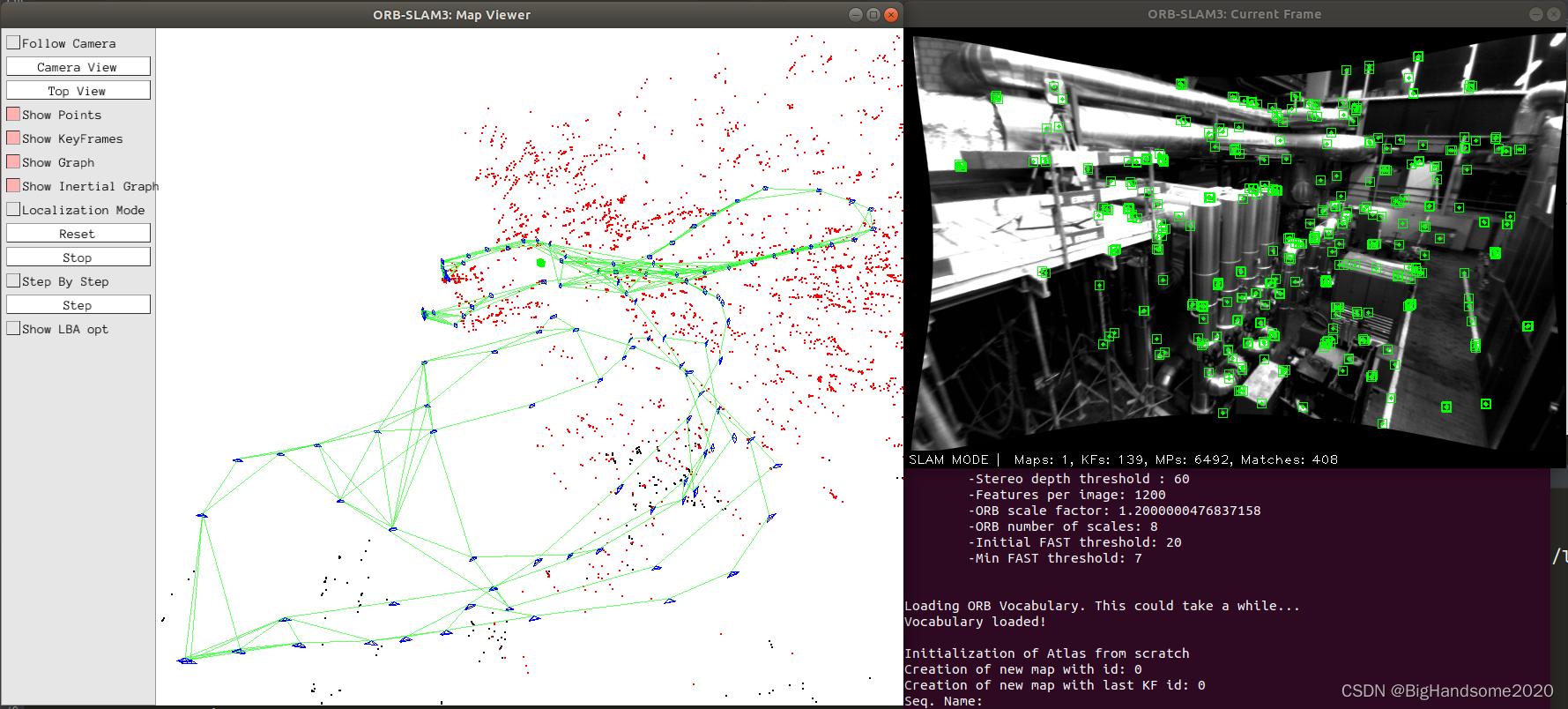
(3)视频序列:MH_03_medium
MH_03_medium 双目 效果
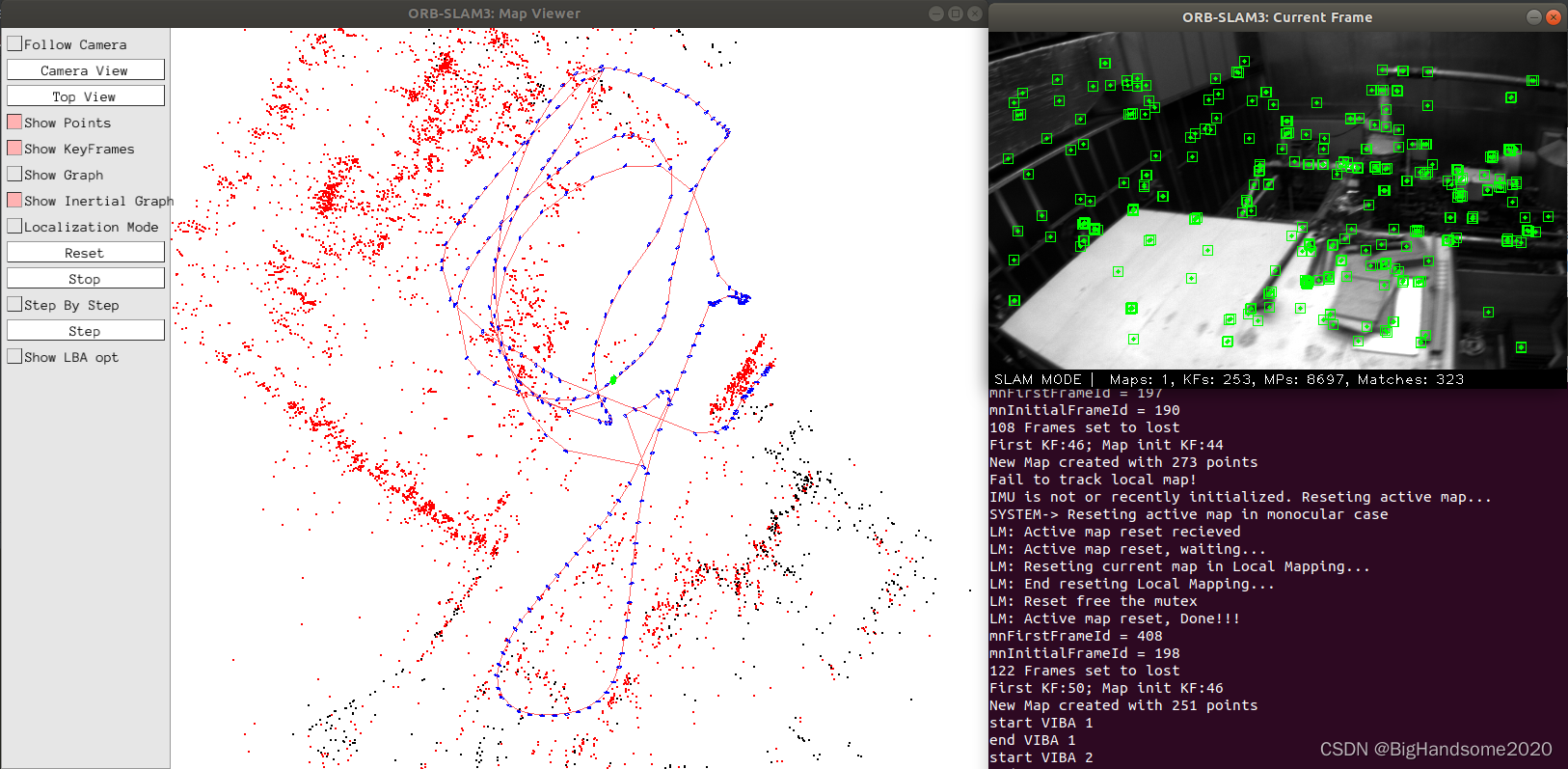
MH_03_medium 单目+IMU 效果
(3)视频序列:V1_01_easy
V1_01_easy 双目 效果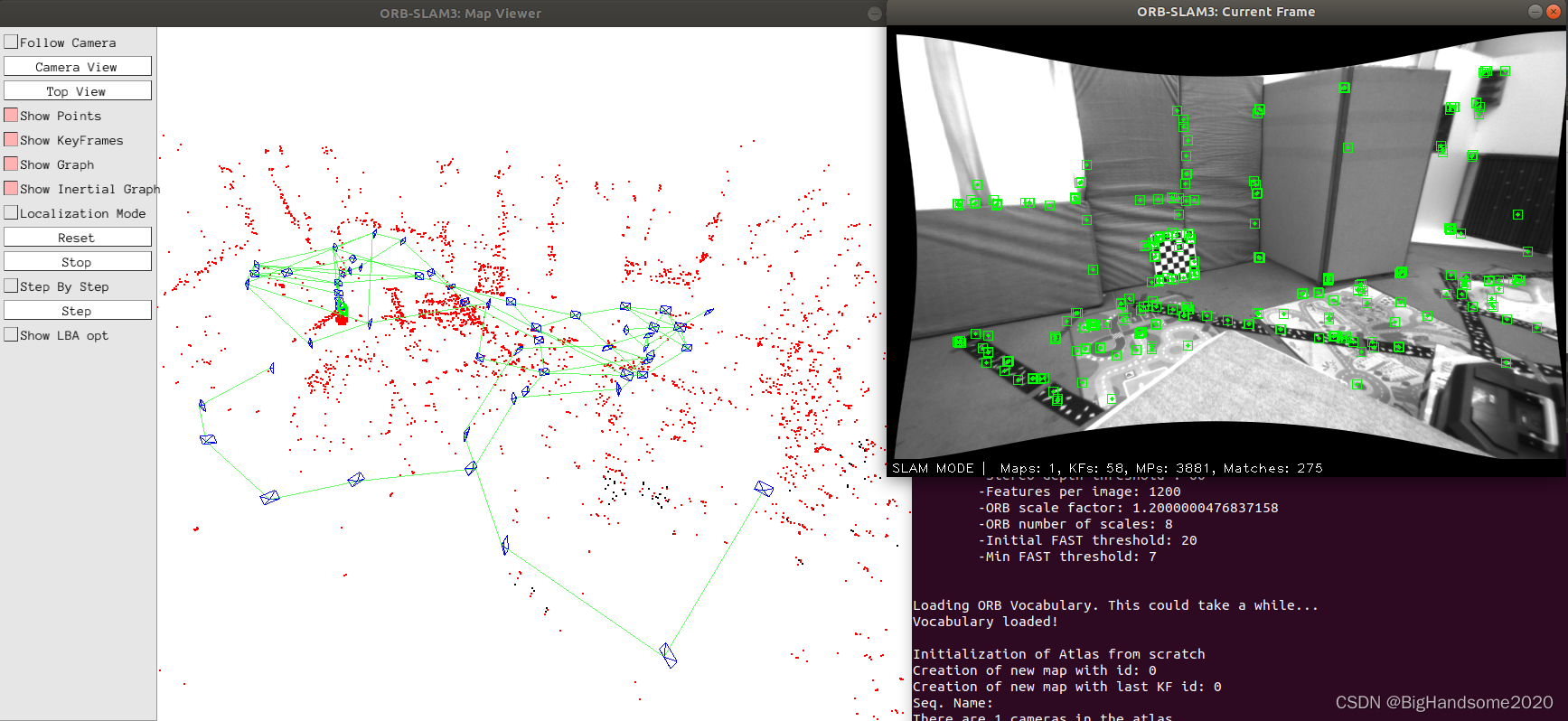
V1_01_easy 单目+IMU 效果
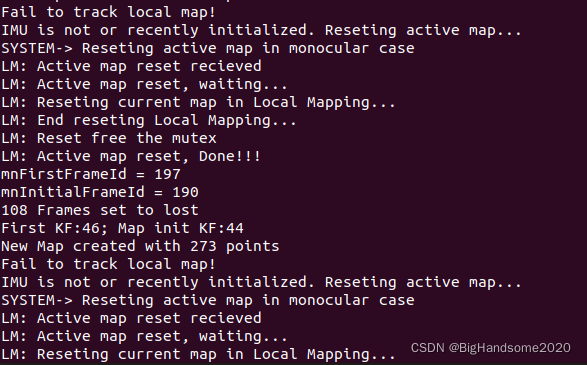
(4)使用IMU数据时可能出现的问题:
(4-a)跟踪局部地图失败,需要等SLAM系统重新初始化
Fail to track local map!
IMU is not or recently initialized.
Reseting active map...
SYSTEM-> Reseting active map in monocular case`
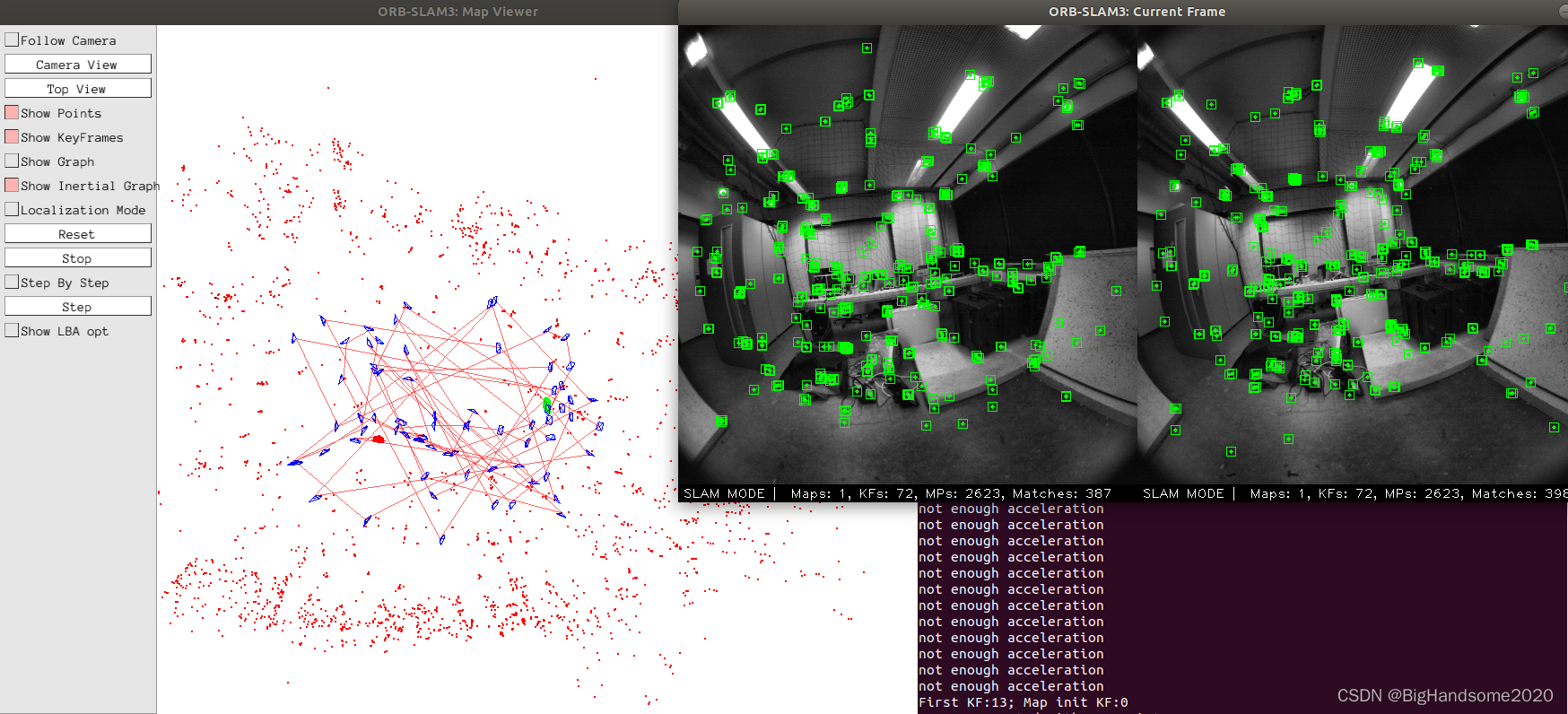
(4-b)IMU加速度不足 not enough acceleration
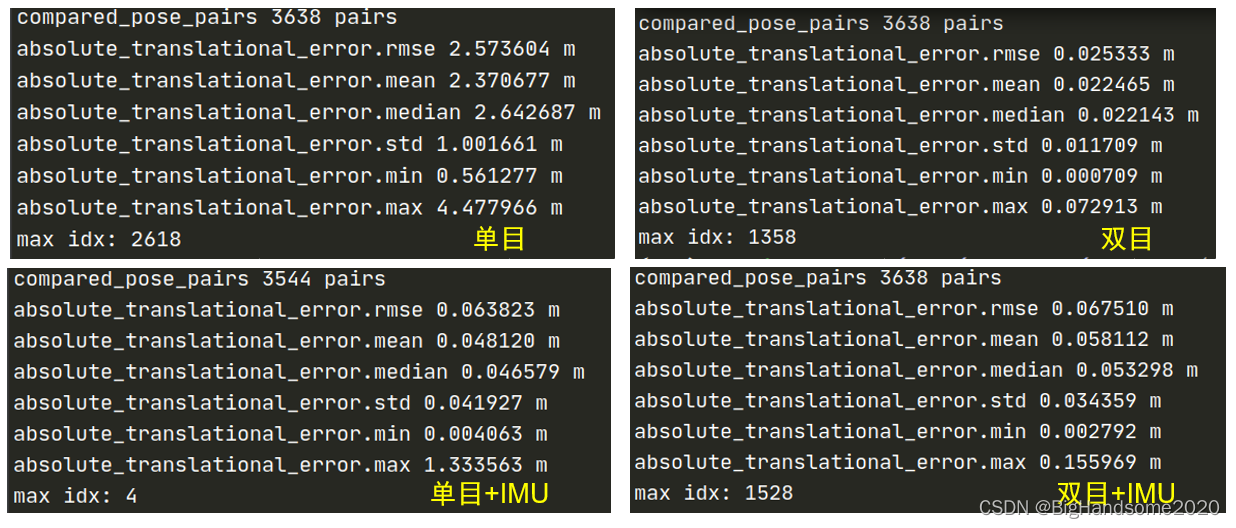
(5)单目、双目、单目+IMU、双目+IMU精度对比
以MH_01_easy视频序列为例,双目或单目+IMU精度最高,单目偏差离谱(由于没有尺度因子,存在零点漂移)
4、测试TUM-VI数据集上的效果
(1)TUM-VI数据集由两个鱼眼摄像头(fisheye)和一个惯性传感器(IMU)记录得到,以下只展示测试的部分视频序列的部分结果
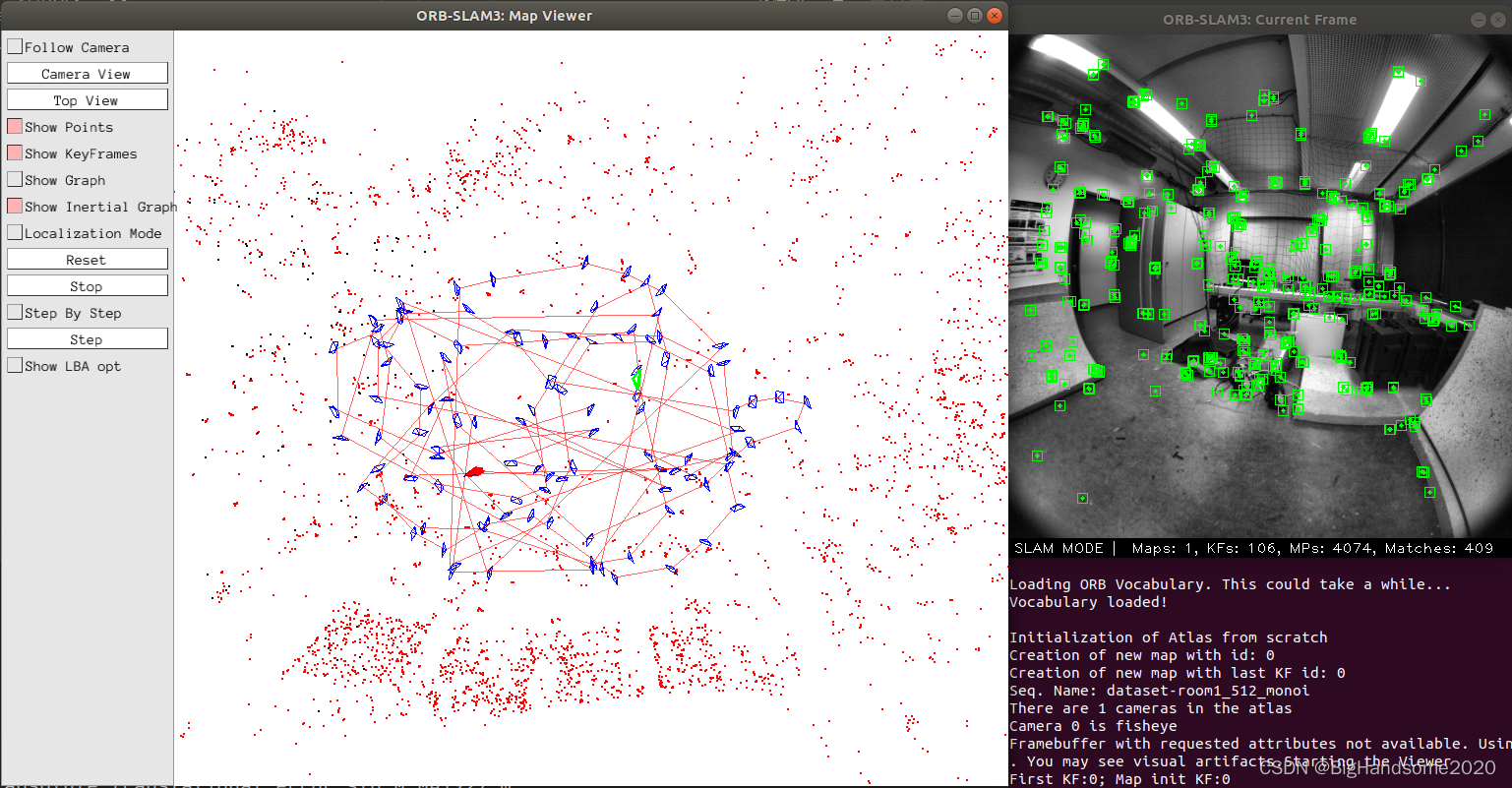
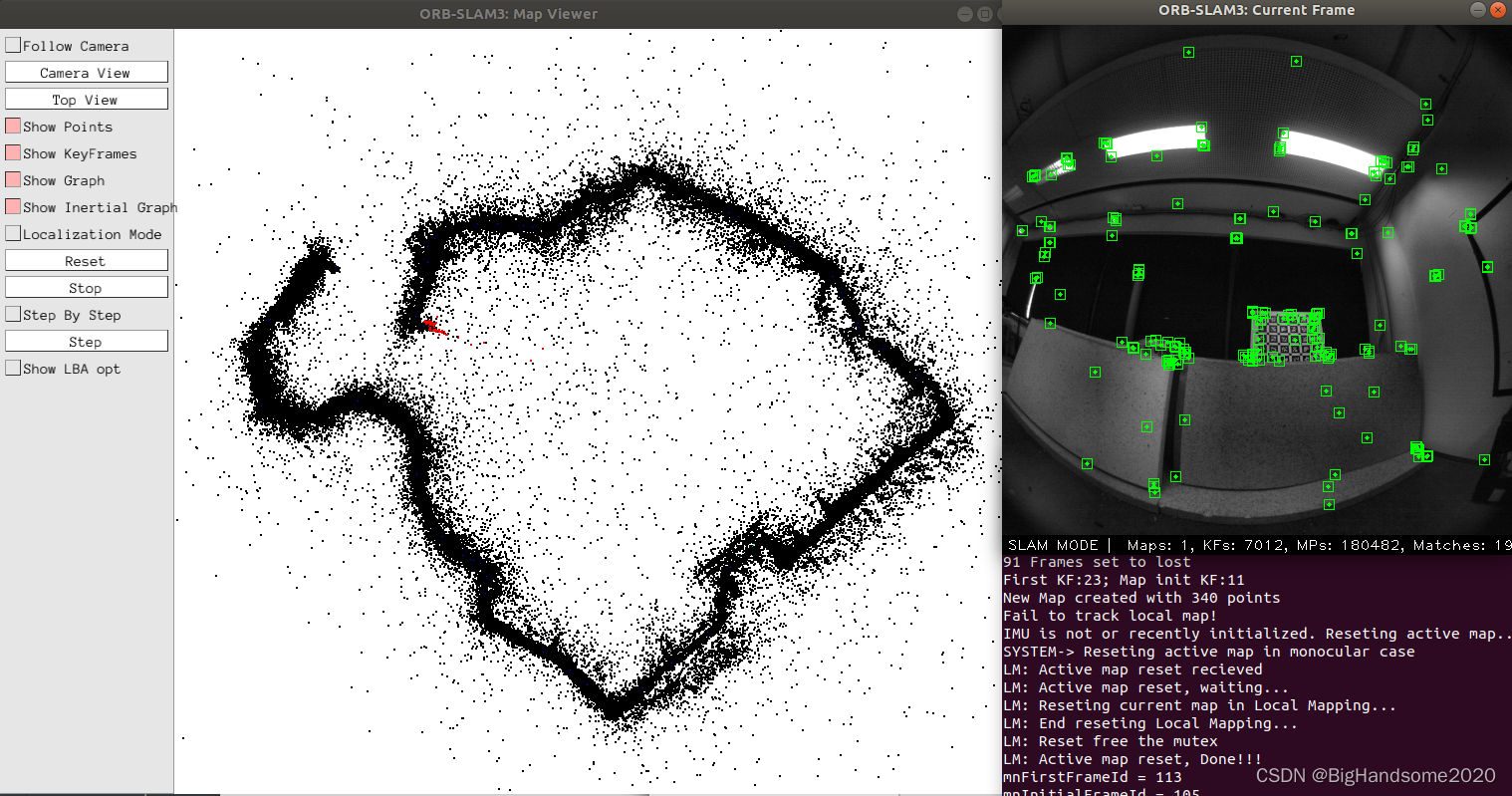
(2)视频序列:dataset-room1_512_16
dataset-room1_512_16 单目+IMU 效果
dataset-room1_512_16 双目+IMU 效果
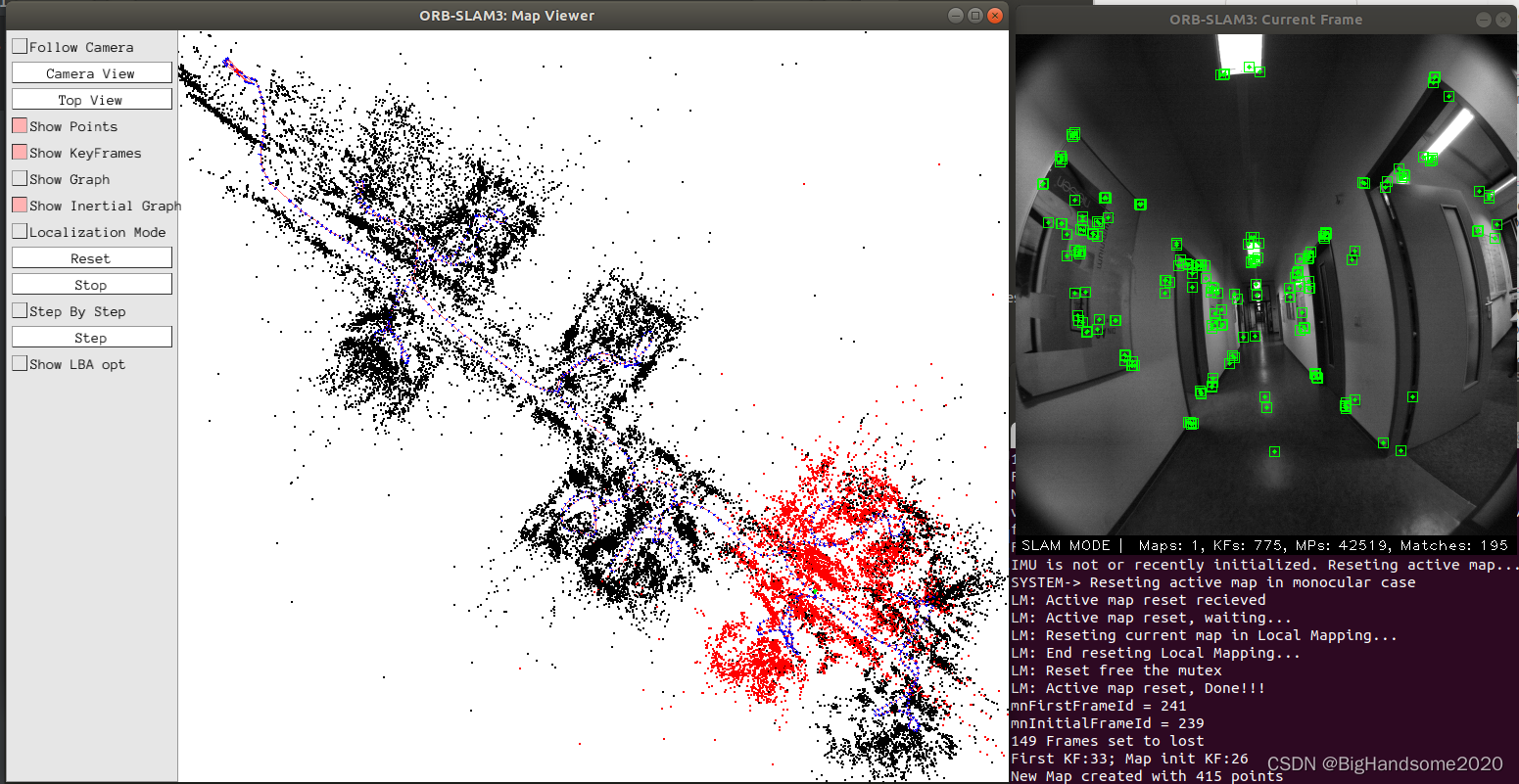
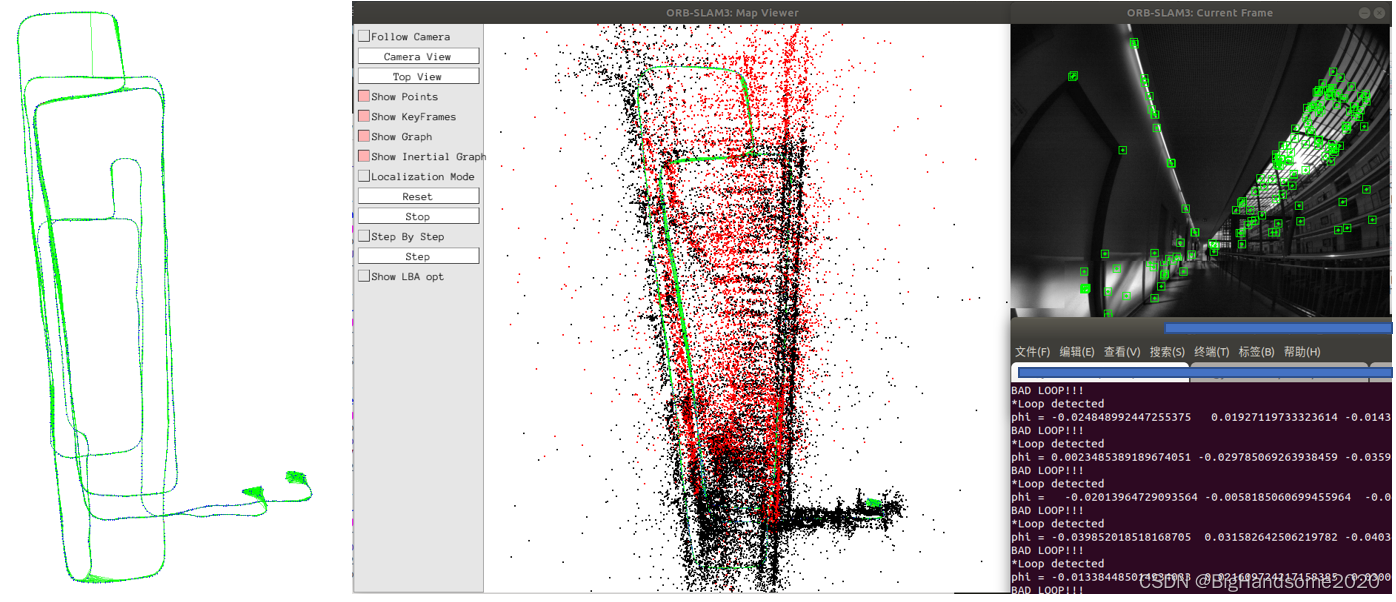
(3)视频序列:dataset-corridor1_512_16
dataset-corridor1_512_16 单目+IMU 效果
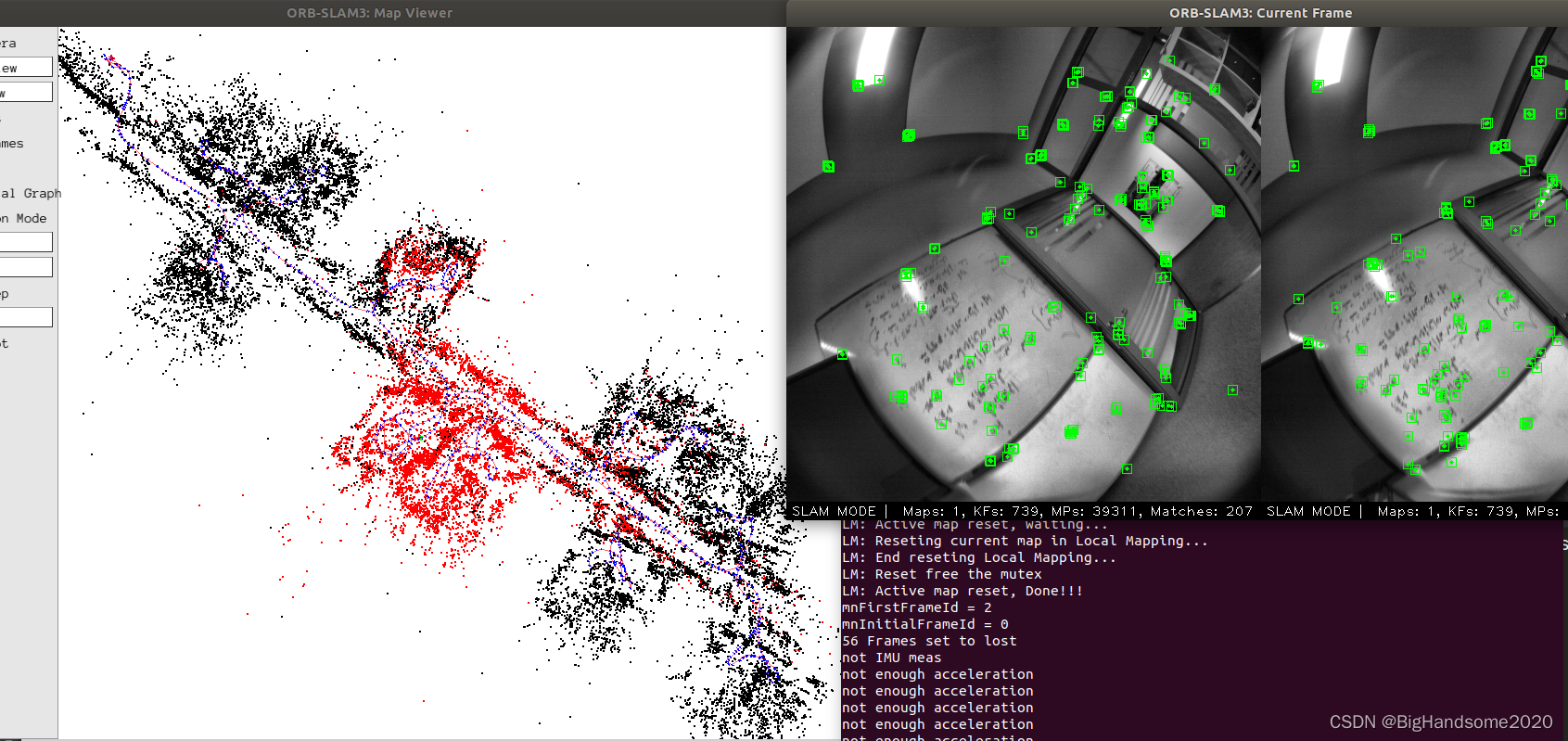
dataset-corridor1_512_16 双目+IMU 效果
(4)视频序列:dataset-magistrale1_512_16
dataset-magistrale1_512_16 单目+IMU 效果
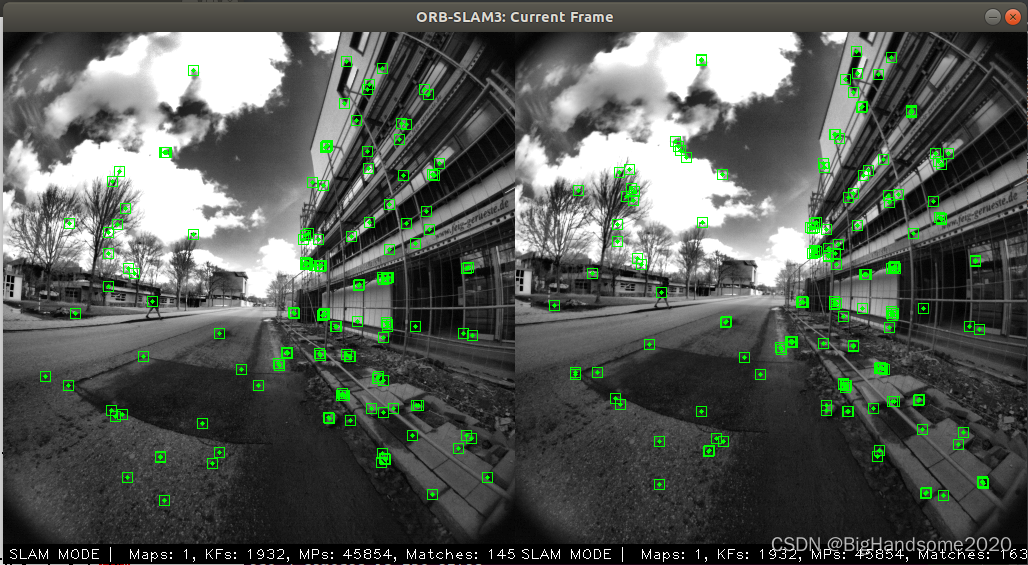
(5)视频序列:dataset-outdoors1_512_16
dataset-outdoors1_512_16 单目+IMU 效果
→ A.不忽略20米外的远处特征点,运行至户外大天空场景时可见算法跟踪到的红框内有很多天空点,会导致算法发散,对地图点的定位失败
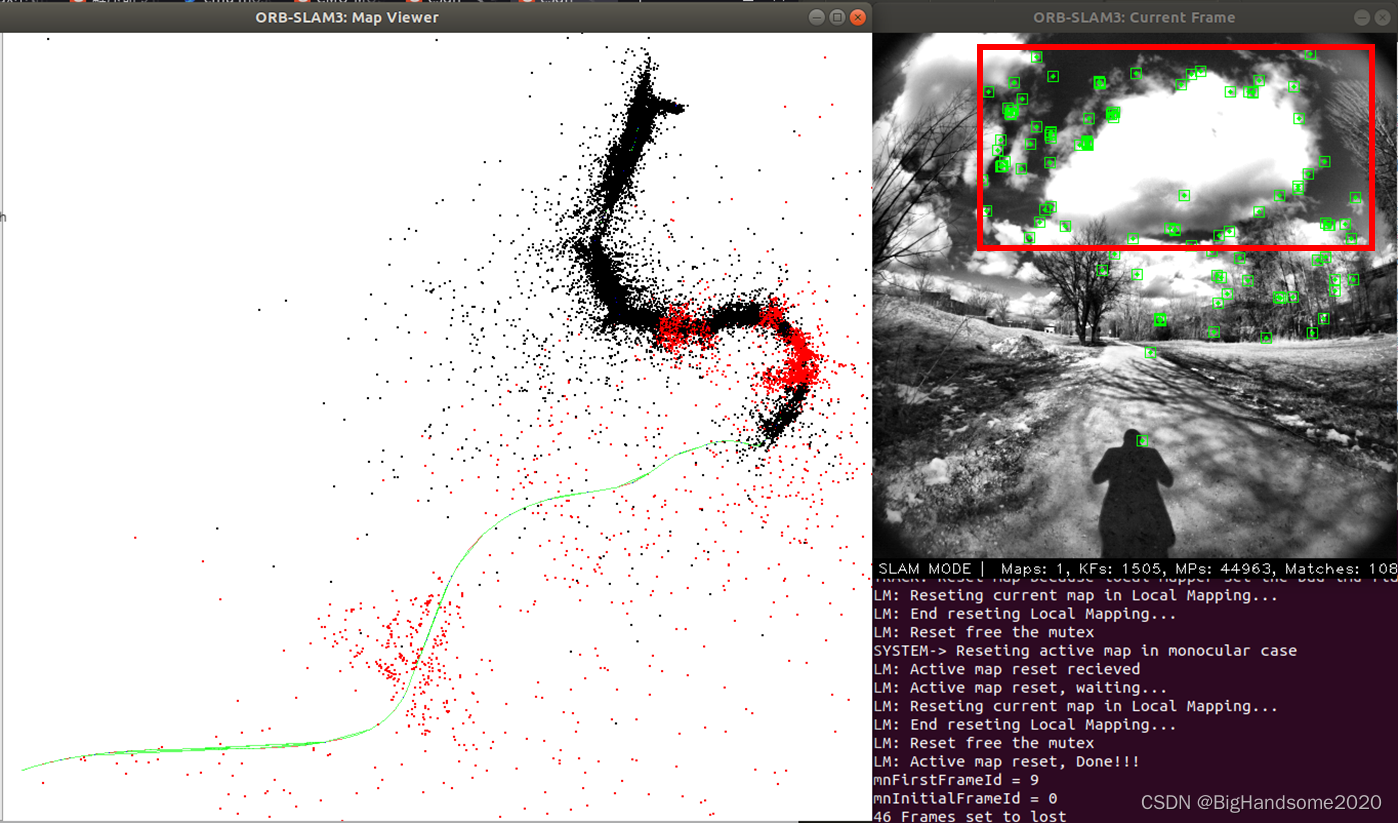
→ B. 忽略20米外的远处特征点后最终建图效果,跑到最后不知为啥总会Shutdown,没能看到闭环检测后的效果,具体后面得再找找原因,
dataset-outdoors1_512_16 双目+IMU 效果
→ A.(1)不忽略20米外的远处特征点,运行至户外大天空场景时可见算法跟踪到的红框内有很多天空点,会导致算法发散,对地图点的定位失败
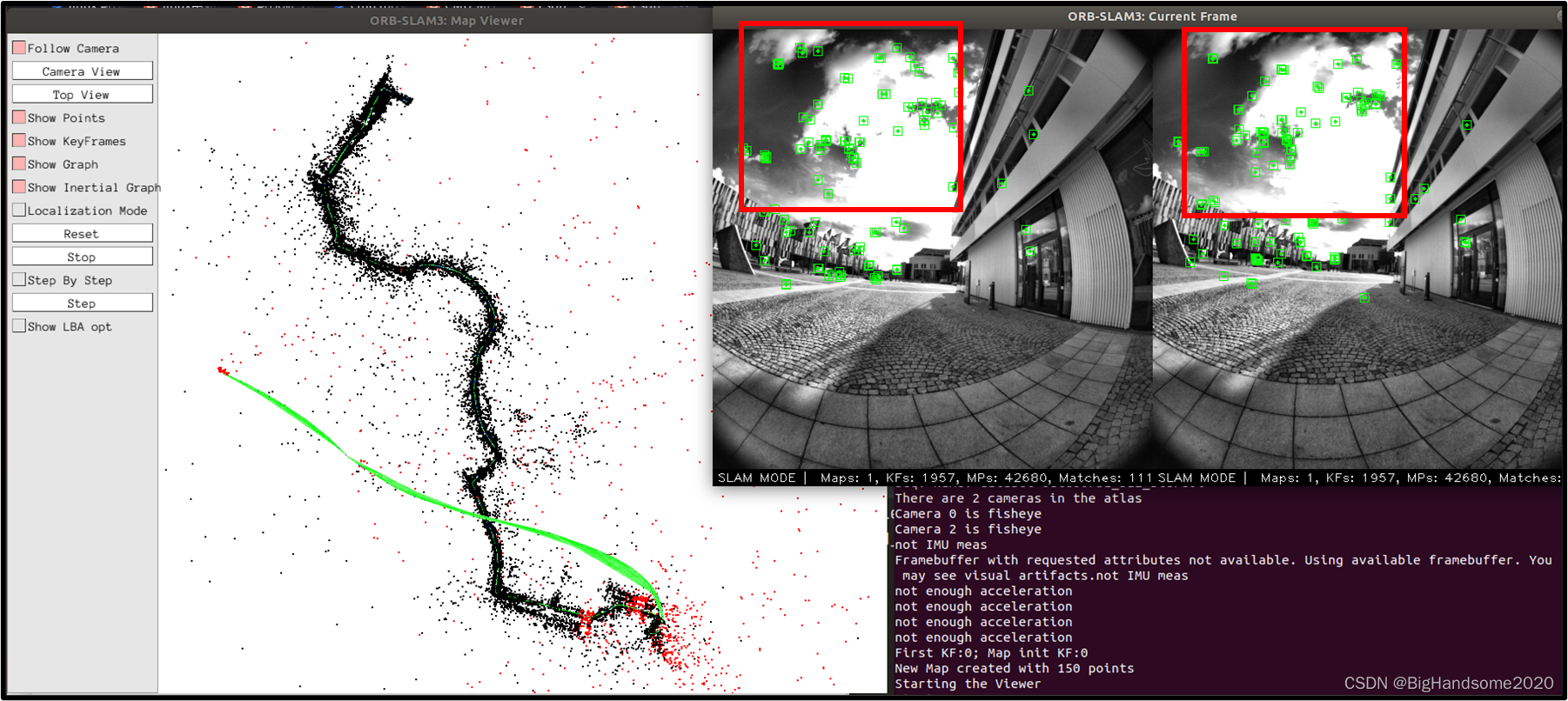
(2)运行到后边越来越卡顿,这是由于地图太大,缓存都吃满了


→ B.(1)忽略20米外的远处特征点,可见户外大天空场景下许多天空点都被滤除了,算法不会发散,匹配点集中在20米内
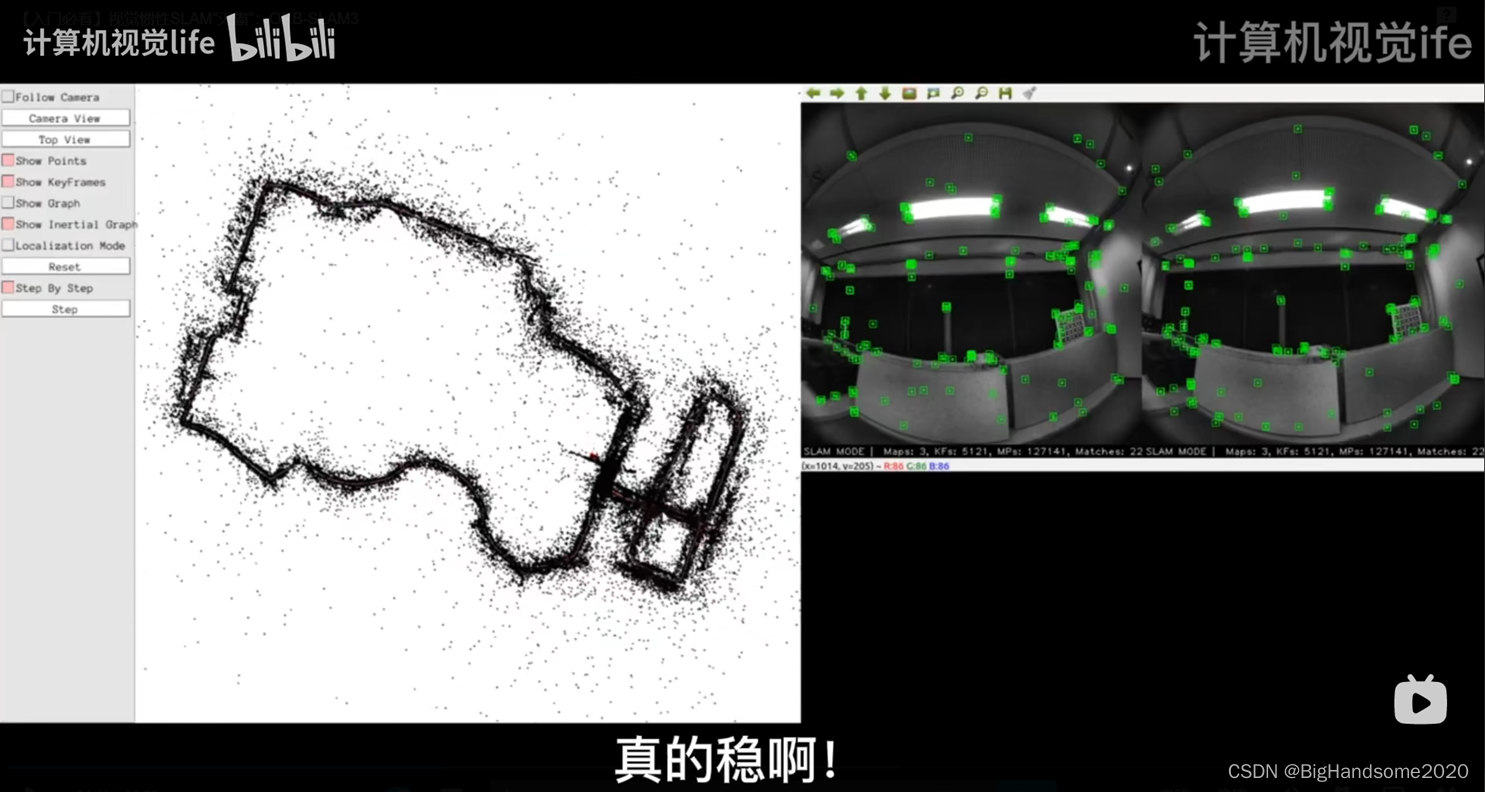
(2)这个是我跑的,在远、大场景不做闭环时,最后可能存在累计漂移
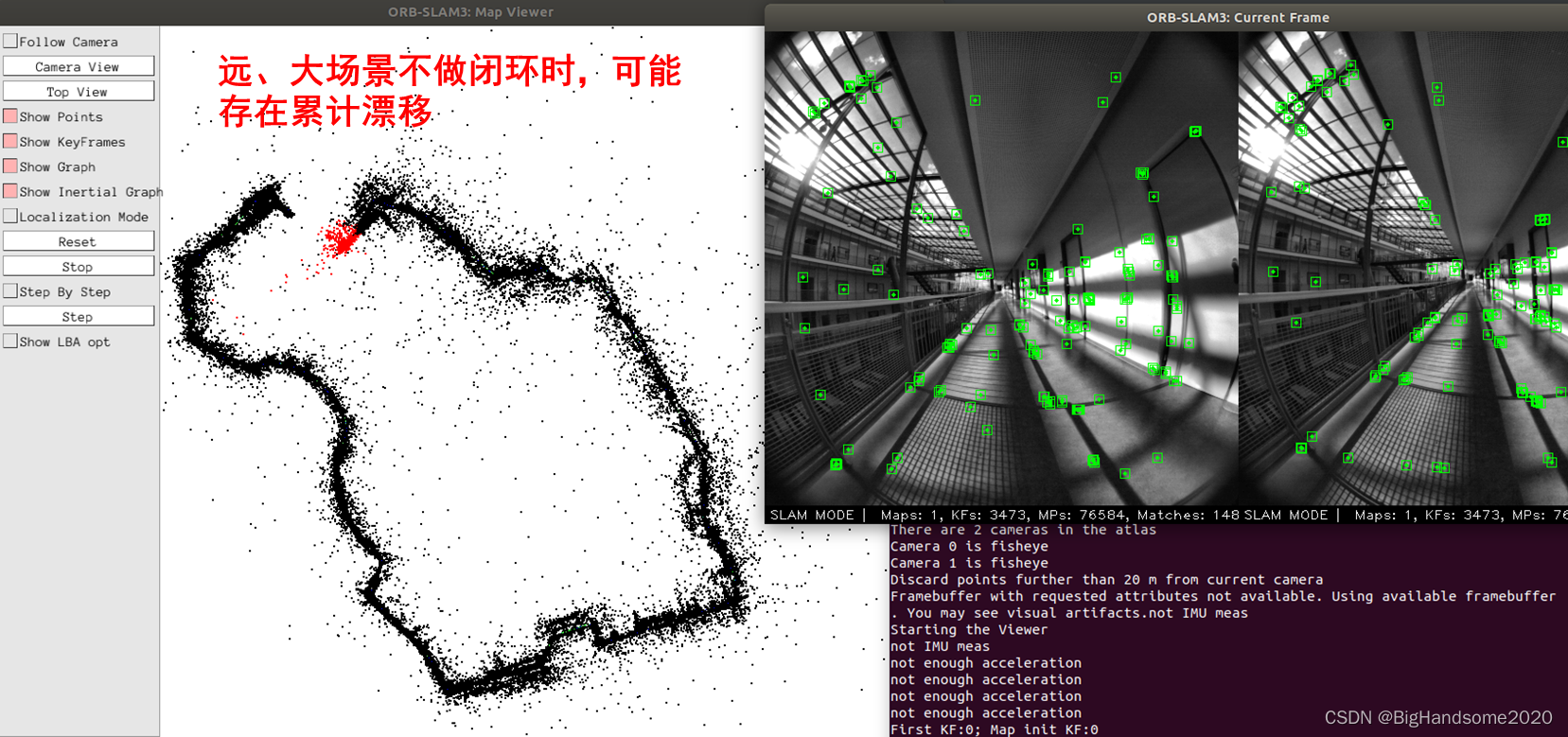
(3)我跑到最后不知为啥总会Shutdown,没能看到闭环检测后的效果,具体后面得再找找原因,最终建图效果可参照别人的结果
(4)忽略20米外的特征点后不会爆内存

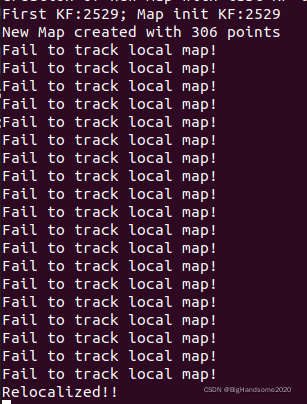
(6)运行问题:Fail to track local map!
跟踪局部地图失败,等待系统执行重定位Relocalize或重新建图new map即可
三、其他问题及本地相机运行参考
https://blog.csdn.net/hhz_999/article/details/120473659
https://blog.csdn.net/qq_36804414/article/details/109241264
https://blog.csdn.net/qq_36804414/article/details/109248693
相关文章
- 你想打造属于自己的GUI图形化界面吗?看看这个文章!
- 酷炫的迁徙图和轮播图,用pyecharts也可以做出来
- 这136页PDF章章经典,没有学不会的“EXCEL数据透视表”!
- 如何使用vlookup+excel数组公式 完成逆向查找?
- 多线程 | Thread 和 Runnable 执行流程的差异
- 5分钟就能做一个Excel动态图表,你确定不学学?
- 「我读」PL 观点 | 未定义行为有利的一面
- 5个好用的Excel技巧,一秒钟完成一个功能
- 我给pyecharts绘制的“时间轮播图”,加上了好玩儿的“图形标志”!
- 这6款windows办公利器,一定有一款你喜欢的!
- Excel超级表的7个特性,你有必要掌握!
- 我用Excel制作了一枚“电子印章”,太牛逼了!
- 编辑Excel时,断电导致文件没保存,怎么恢复呢?
- 一个参数一个xlsx表,让你玩转Pandas中read_excel()表格读取!
- MQ46# 实战|RocketMQ分区阻塞应急处理
- 分享大厂的一些笔试题目
- Python+os+openpyxl 批量获取Excel的文件名和最大行数
- 老板让我处理上百个表格,最终我选择了Python自动化办公处理!
- 直接保存“DataFrame表格”到本地,这个“骚操作”90%以上的人不知道!
- 技术很重要,效率也很重要!总结了3个office办公操作,你看看你都会吗?