
当前栏目
图的最短路径
最短路径
概念
从在带权有向图G中的某一顶点出发, 找出一条通往另一顶点的最短路径, 最短也就是沿路径各边的权值总和达到最小.
分类
- 单源最短路径: 从某个源点到其它各顶点的最短路径.
- Dijkstra算法
- Bellman-Ford算法
- 多源最短路径: 每一对顶点之间的最短路径.
- Floyd-Warshall算法
- 每次以一个顶点为源点重复调用单源最短路径算法n次
Dijkstra算法
给定一个带权图G的每条边(vi,vj)上的权值都是非负实数. 另外, 给定V中的一个顶点s充当源点.
基本思想: 按路径长度递增的次序来产生最短路径算法.
把V分成两组:
- S: 已求出最短路径的顶点集合.
- Q=V-S: 尚未确定最短路径的顶点集合, 将V-S中顶点按最短路径递增的次序加入到S中.
S是已经确定最短路径的顶点集合, 在初始时为空(初始时就可以将源节点s放入,毕竟源节点到自己的代价是0).
Q 为其余未确定最短路径的顶点集合, 每次从Q中找出一个源顶点s到该顶点代价最小的顶点u, 将u从Q中移出并放入S中, 对u的每一个相邻结点v进行松弛操作.
松弛即对每一个相邻结点v, 判断源顶点s到顶点u的代价与u到v的代价之和是否比原来s到v的代价更小, 若代价比原来小则要将s到v的代价更新为s到u与u到v的代价之和, 否则维持原样.
如此一直循环直至集合Q为空, 即所有顶点都已经查找过一遍并确定了最短路径, 至于一些源点s到达不了的顶点在算法循环后其代价仍为初始设定的值, 不会发生变化.
Dijkstra算法每次都是选择V-S中最小的路径顶点来进行更新, 并加入S中所以该算法使用的是贪心策略。
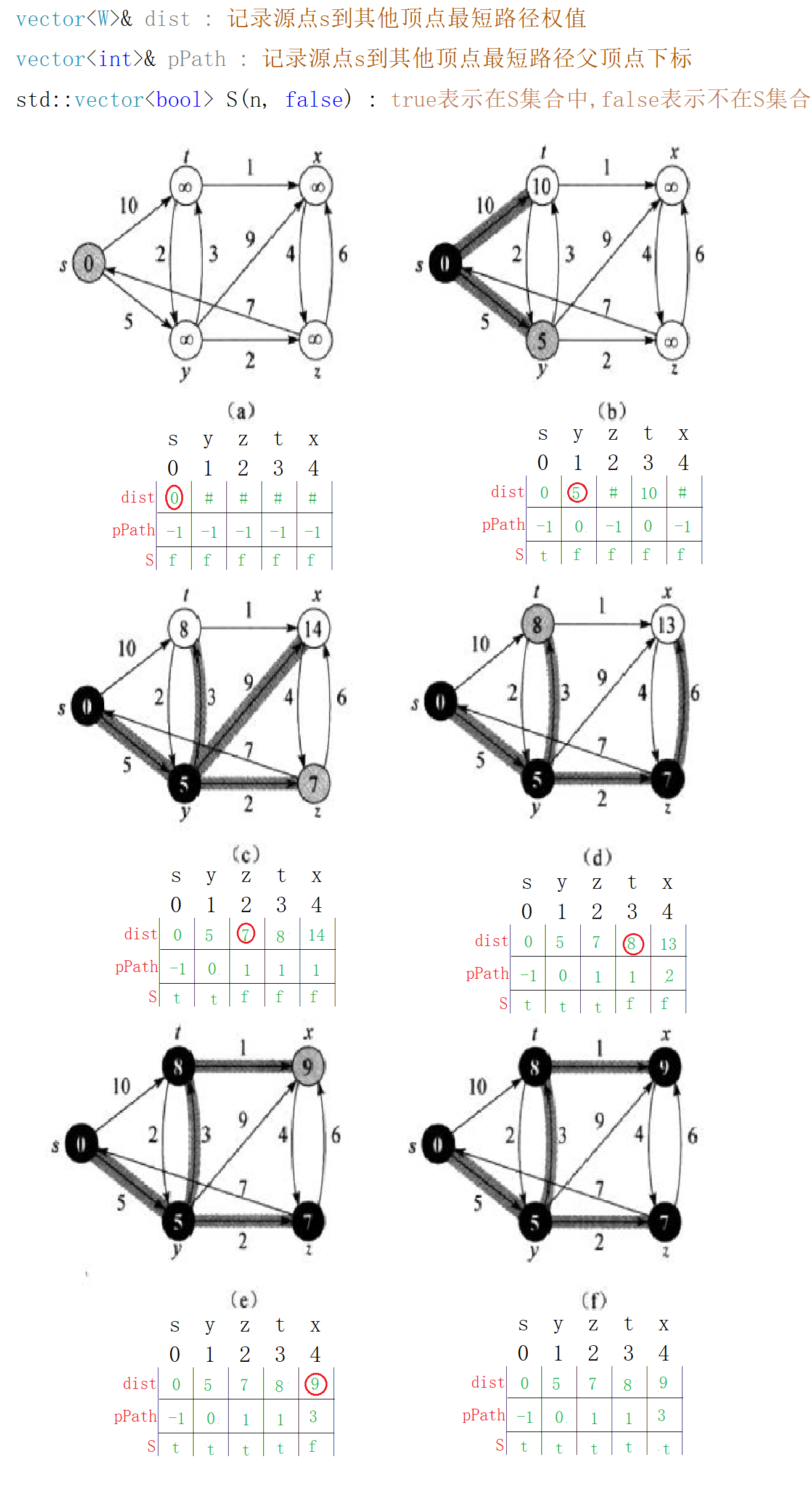
dist[] : 记录从源点s到其它顶点当前的最短路径长度. 初始时源点s对应的元素为0, 其它为无穷大.
pPath[] : pPath[i]表示从源点到顶点i之间的最短路径的前驱顶点的下标. 初始时全为-1, 在算法结束时, 可根据其下标值追溯得到源点s到顶点i的最短路径.
邻接表
邻接矩阵
通过dist[]与pPath[]打印源点s到其它顶点的最短路径:
void PrintShortPath(const V& src, const vector<W>& dist, const vector<int>& pPath)
{
int srci = GetVertexIndex(src);
if (srci == -1)
{
return;
}
int n = (int)_vertexSet.size();
for (int i = 0; i < n; i++)
{
if (i != srci)
{
int p = i;
vector<int> v;
// 先获取源点s到某顶点的路径
while (pPath[p]!=-1)
{
v.push_back(p);
p = pPath[p];
}
v.push_back(p);
// 打印路径和对应的代价
for (int j = (int)(v.size() - 1); j >= 0; j--)
{
std::cout << _vertexSet[v[j]] << "-->";
}
std::cout << dist[i] << std::endl;
}
}
}
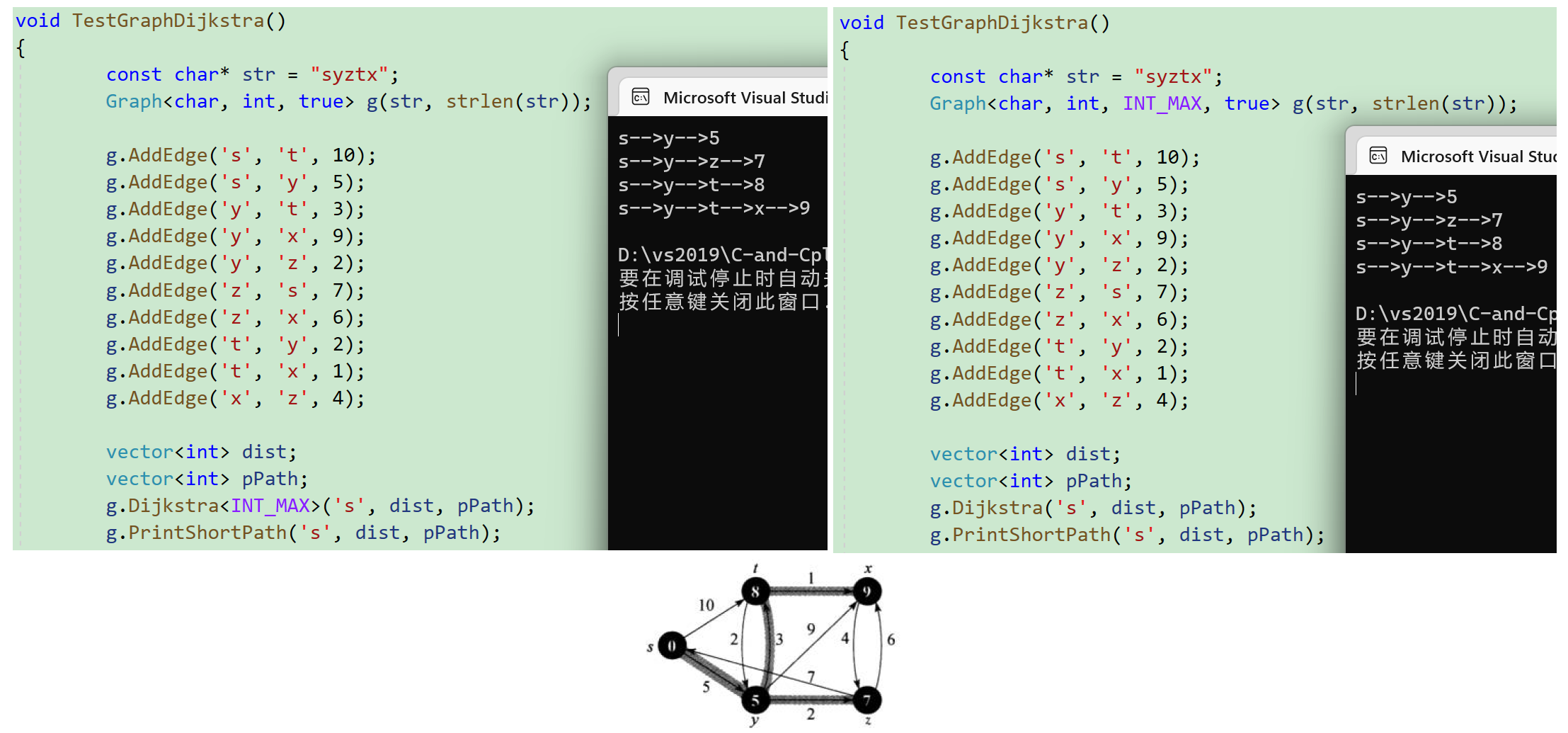
邻接表与邻接矩阵的测试:
需要注意的是, 对于含有负权值边的图Dijkstra算法不支持:
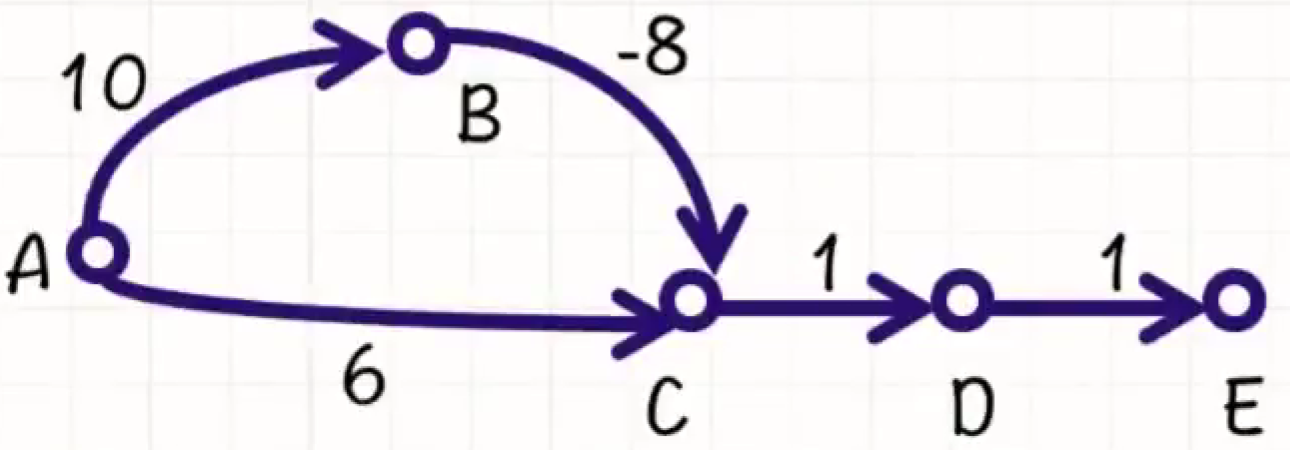
Dijkstra算法是贪心算法, 当最小取进来后, 不会返回去重新计算. 如从A出发, 先选C代价为6, 之后A到达C的路径不会再去更新, 因为C已经加入到了S集合.
要解决含有负权值边的图需要用到Bellman-Ford算法.
时间性能分析:
对于一个含有n个顶点和e条边的有向图, 基于邻接表与邻接矩阵的Dijkstra算法的时间复杂度为O(n2).
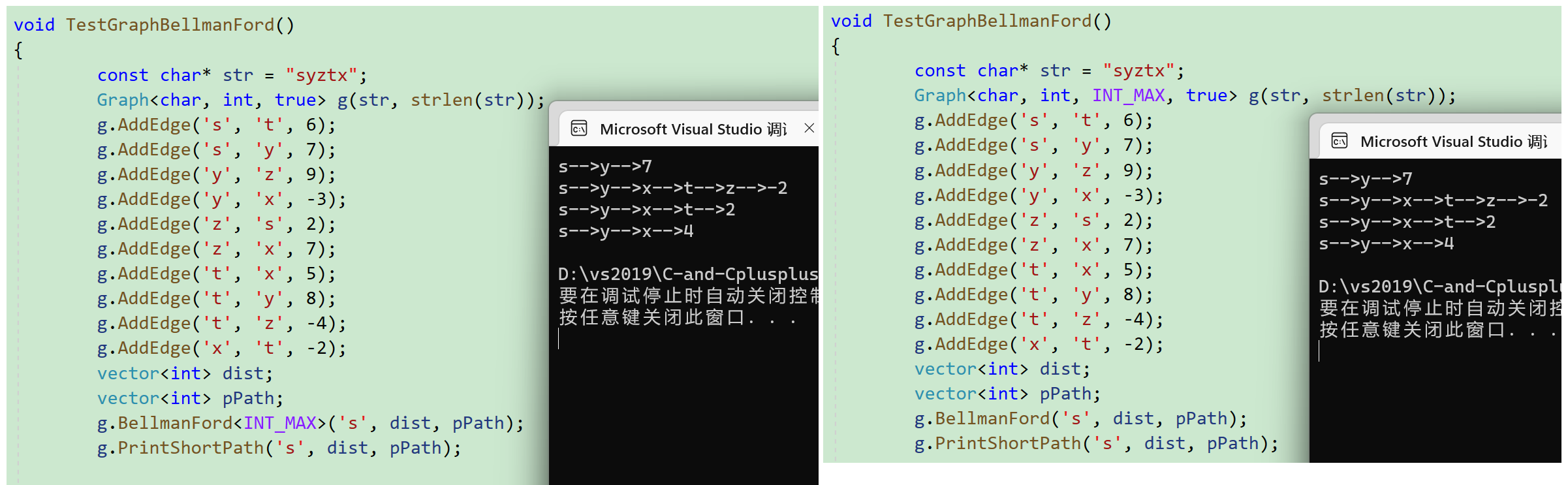
Bellman-Ford算法
Dijkstra算法只能用来解决正权值图的单源最短路径问题, 但有些题目会出现负权图. 这时这个算法就不能帮助我们解决问题了, 而bellman—ford算法可以解决负权值图的单源最短路径问题.
它的优点是可以解决有负权值边的单源最短路径问题, 而且可以用来判断是否有负权回路. 但时间效率低.
负权值回路问题什么算法都无法解决, 因为会陷入死循环.
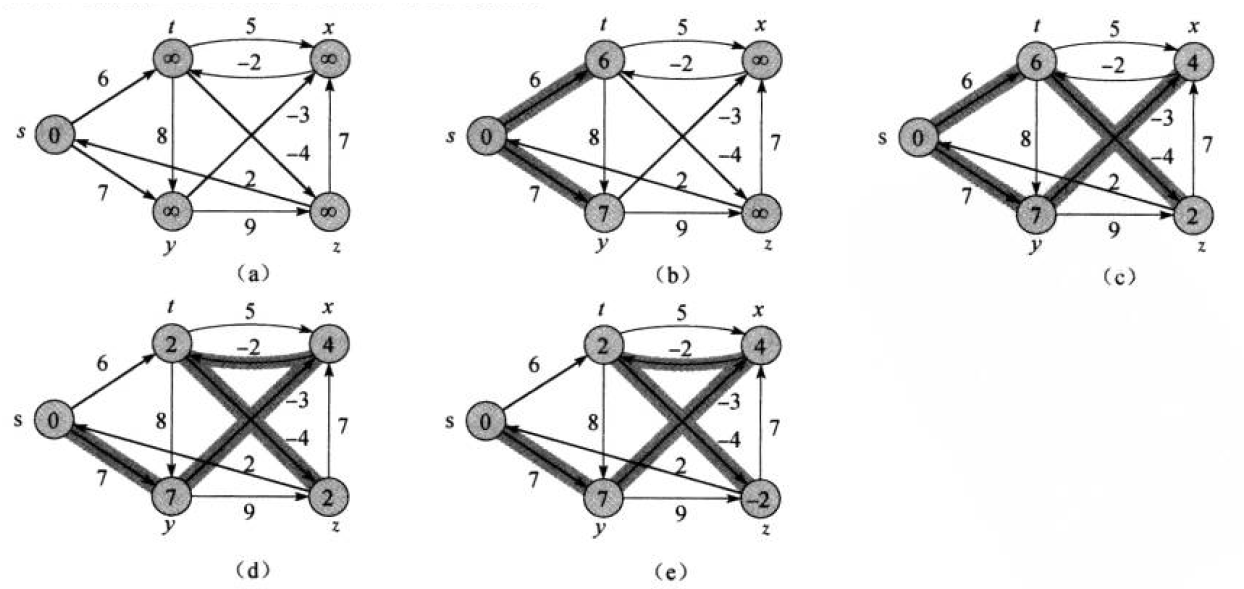
Bellman-Ford算法的主要思想是: 对于起始顶点s和某终止顶点j, 是否能通过顶点i, 使s->i->j的代价小于s->j. 如果成立则进行代价dist和路径pPath更新.
邻接表
邻接矩阵
邻接表与邻接矩阵的测试:
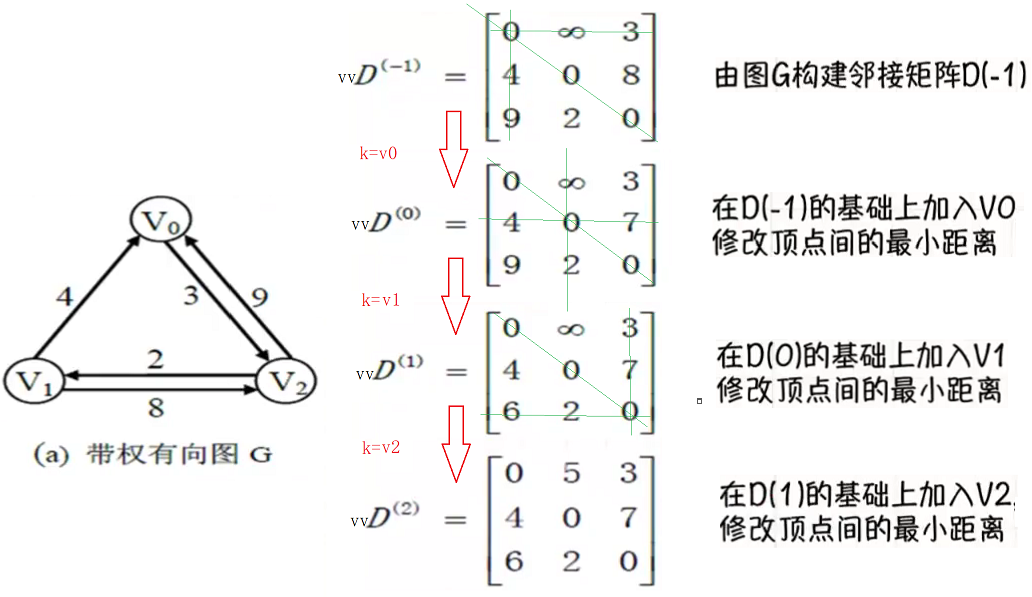
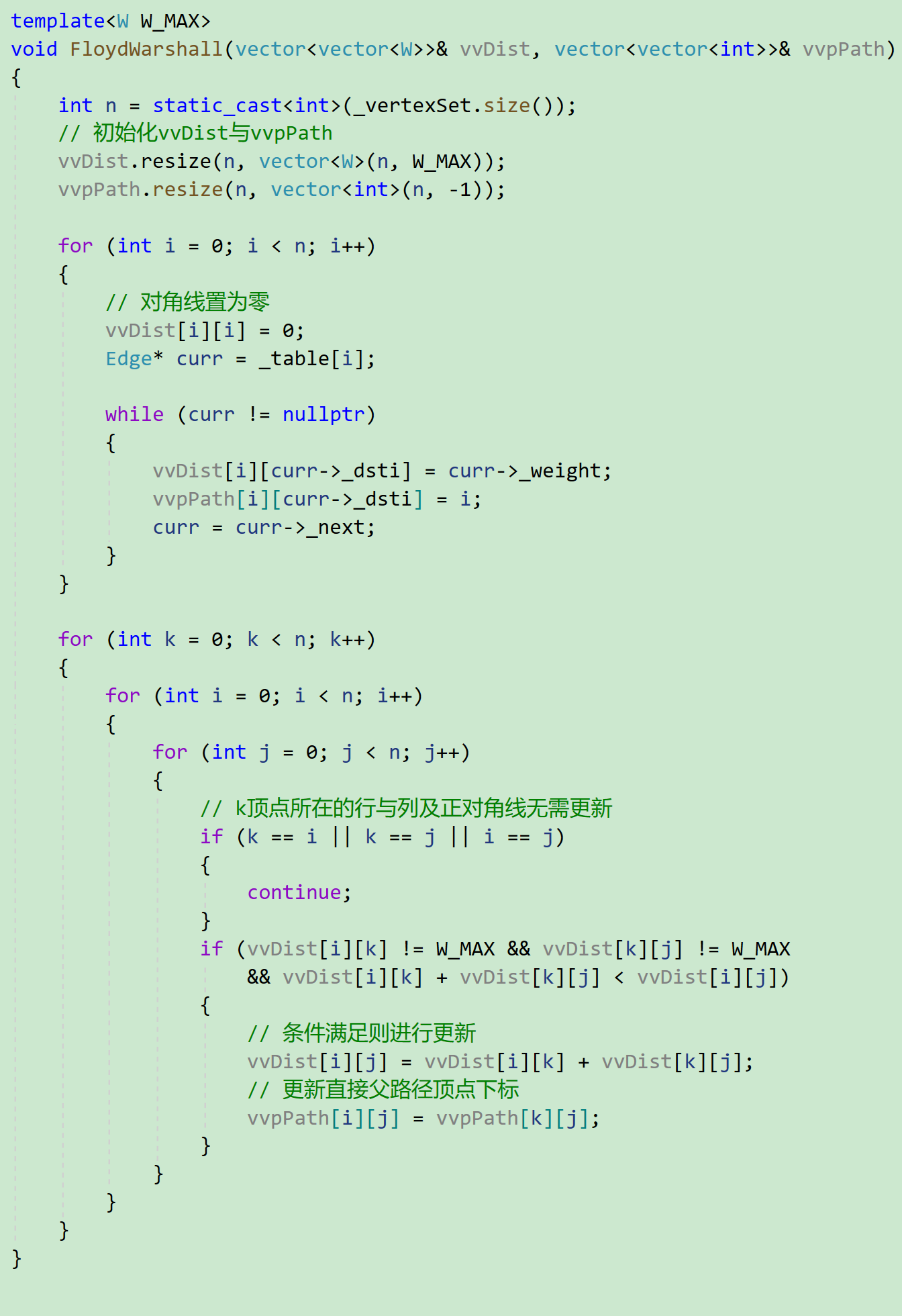
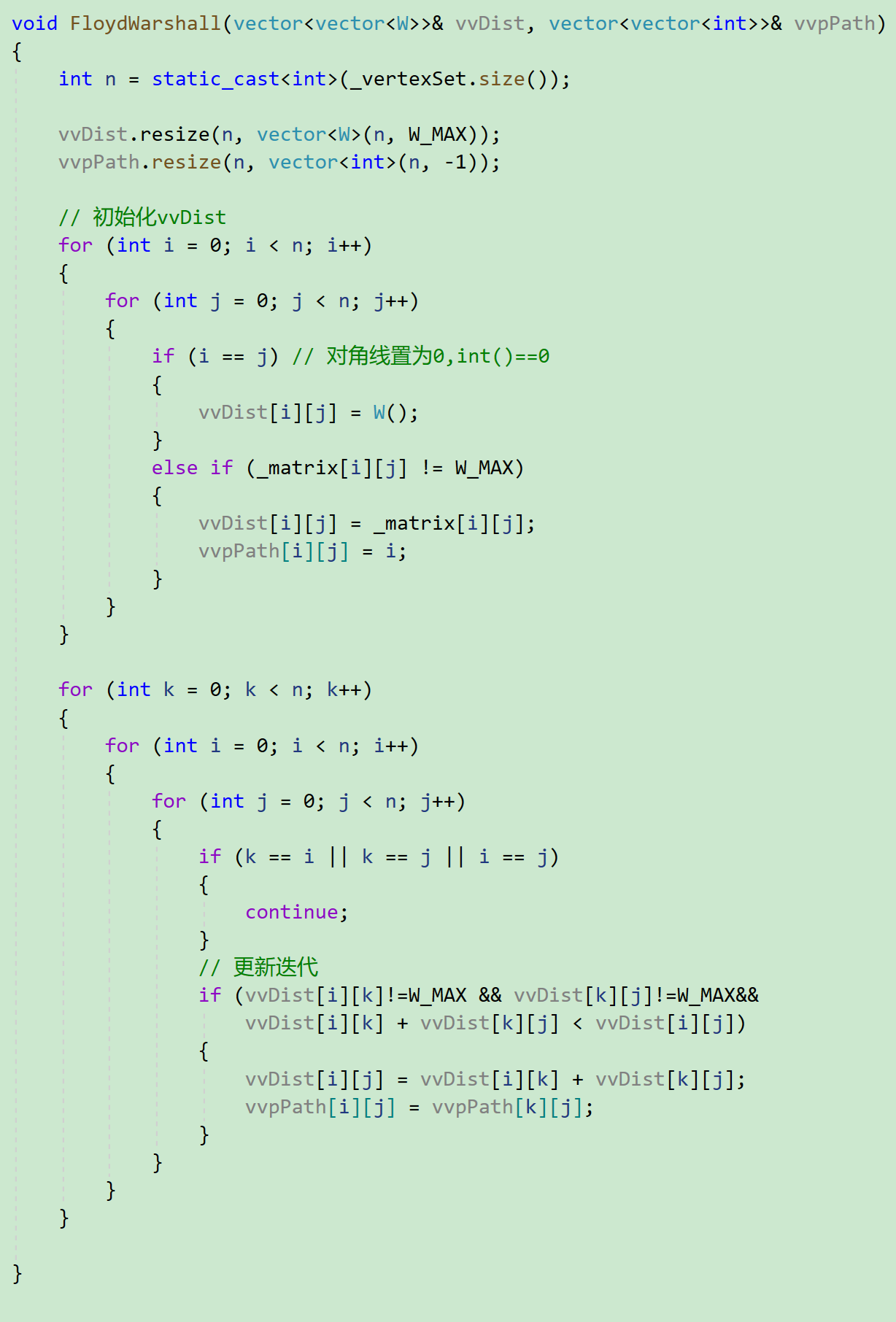
Floyd-Warshall算法
Floyd算法是典型的动态规划, 自底向上分别求解子问题的解, 然后由这些子问题的解得到原问题的解. 这个算法的时间复杂度是O(n3), 但形式上比较简单.
Floyd算法步骤:
- 初始化vvDist矩阵, 若vi到vj没有边弧, 则vvDist[i] [j]=∞; 若i==j, 则vvDist[i] [j]=0; 否则, 若vi到vj存在边弧, 则vvDist[i] [j]=weight(vi, vj).
- 对于每一个顶点vk, 若vvDist[i] [k]+vvDist[k] [j] < vvDist[i] [j]成立, 表明从vi经过vk再到vj的路径比原来vi到vj的路径短, 则更新vvDist[i] [j]=vvDist[i] [k]+vvDist[k] [j].
- 将图中n个顶点依次加入每对顶点间进行探测, 最终矩阵vvDist中记录的便是每对顶点间的最短路径的长度.
邻接表
邻接矩阵
邻接表与邻接矩阵的测试:

源代码
邻接表
#define _CRT_SECURE_NO_WARNINGS 1
#include <unordered_set>
#include <functional>
#include <iostream>
#include <cstring>
#include <string>
#include <vector>
#include <stack>
#include <queue>
#include <map>
using namespace std;
namespace AdjacentList
{
template<typename W>
struct Edge
{
int _dsti;
W _weight;
struct Edge<W>* _next;
Edge(int dsti, const W& weight)
:_dsti(dsti)
, _weight(weight)
, _next(nullptr)
{}
};
template<typename V, typename W, bool Directed = false>
class Graph
{
using Edge = Edge<W>;
private:
std::vector<V> _vertexSet; // 顶点的集合
std::map<V, int> _vertexIndex; // 顶点映射下标
std::vector<Edge*> _table; // 出度边表
public:
typedef Graph<V, W, Directed> Self;
Graph() = default;
Graph(const V* a, int n)
{
for (int i = 0; i < n; i++)
{
AddVertex(a[i]);
}
}
int GetVertexIndex(const V& v)
{
typename std::map<V, int>::iterator pos = _vertexIndex.find(v);
if (pos != _vertexIndex.end())
{
return pos->second;
}
else
{
return -1;
}
}
bool AddVertex(const V& v)
{
if (GetVertexIndex(v) != -1)
return false;
_vertexSet.push_back(v);
_vertexIndex.insert(std::make_pair(v, _vertexSet.size() - 1));
_table.push_back(nullptr);
return true;
}
bool _AddEdge(int srci, int dsti, const W& weight)
{
Edge* edge = new Edge(dsti, weight);
// 头插
edge->_next = _table[srci];
_table[srci] = edge;
// 无向图
if (!Directed)
{
edge = new Edge(srci, weight);
edge->_next = _table[dsti];
_table[dsti] = edge;
}
return true;
}
bool AddEdge(const V& src, const V& dst, const W& weight)
{
int srci = GetVertexIndex(src);
int dsti = GetVertexIndex(dst);
// 顶点不在图中,添加边失败
if (srci == -1 || dsti == -1)
return false;
return _AddEdge(srci, dsti, weight);
}
void PrintShortPath(const V& src, const vector<W>& dist, const vector<int>& pPath)
{
int srci = GetVertexIndex(src);
if (srci == -1)
{
return;
}
int n = (int)_vertexSet.size();
for (int i = 0; i < n; i++)
{
if (i != srci)
{
int p = i;
vector<int> v;
while (pPath[p] != -1)
{
v.push_back(p);
p = pPath[p];
}
v.push_back(p);
for (int j = (int)(v.size() - 1); j >= 0; j--)
{
std::cout << _vertexSet[v[j]] << "-->";
}
std::cout << dist[i] << std::endl;
}
}
}
const W& _GetEdgeWeight(int srci, int dsti)
{
Edge* curr = _table[srci];
while (curr != nullptr)
{
if (curr->_dsti == dsti)
{
return curr->_weight;
}
curr = curr->_next;
}
return W();
}
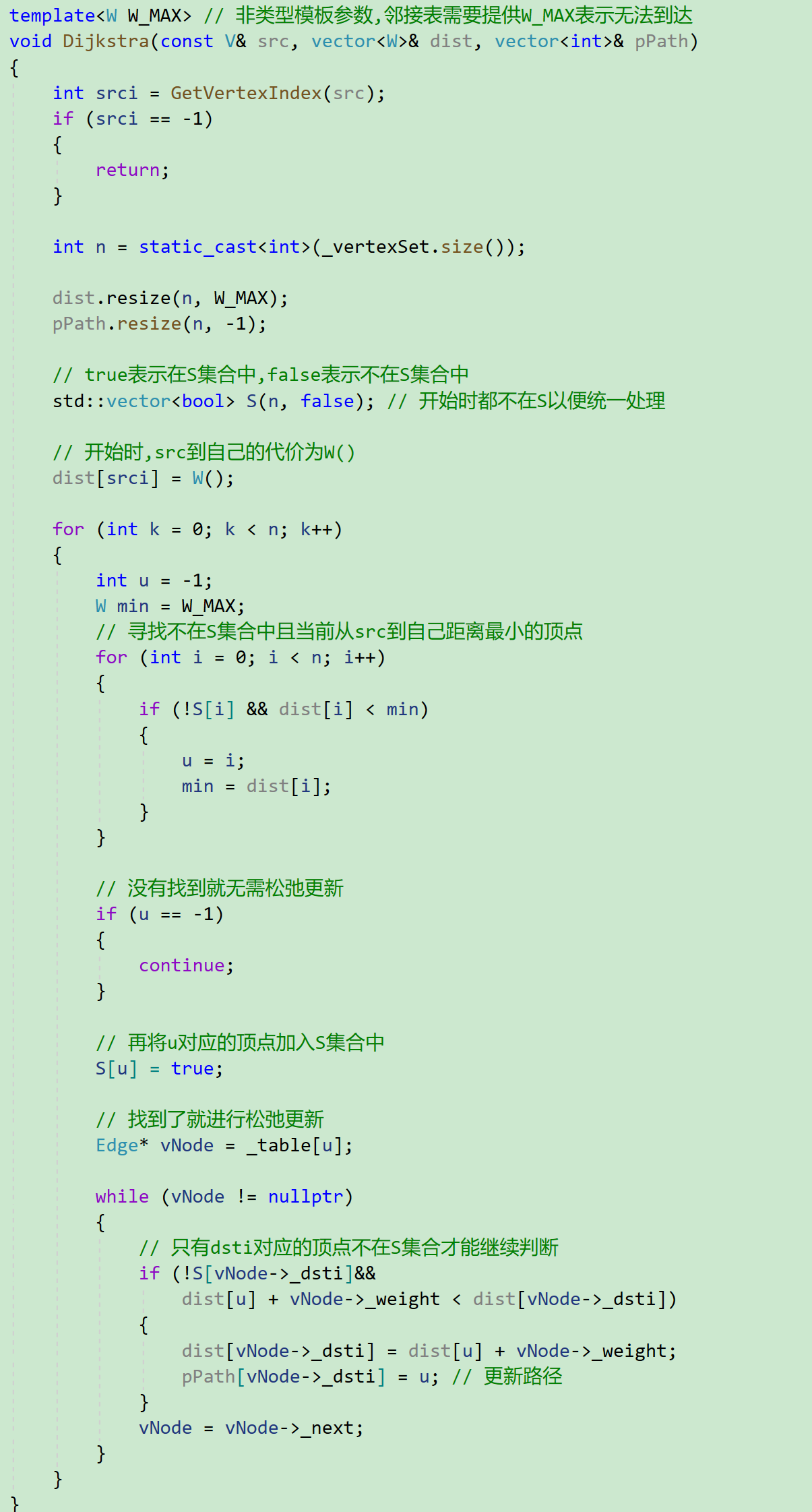
template<W W_MAX> // 非类型模板参数,邻接表需要提供W_MAX表示无法到达
void Dijkstra(const V& src, vector<W>& dist, vector<int>& pPath)
{
int srci = GetVertexIndex(src);
if (srci == -1)
{
return;
}
int n = static_cast<int>(_vertexSet.size());
dist.resize(n, W_MAX);
pPath.resize(n, -1);
// true表示在S集合中,false表示不在S集合中
std::vector<bool> S(n, false); // 开始时都不在S以便统一处理
// 开始时,src到自己的代价为W()
dist[srci] = W();
for (int k = 0; k < n; k++)
{
int u = -1;
W min = W_MAX;
// 寻找不在S集合中且当前从src到自己距离最小的顶点
for (int i = 0; i < n; i++)
{
if (!S[i] && dist[i] < min)
{
u = i;
min = dist[i];
}
}
// 没有找到就无需松弛更新
if (u == -1)
{
continue;
}
// 再将u对应的顶点加入S集合中
S[u] = true;
// 找到了就进行松弛更新
Edge* vNode = _table[u];
while (vNode != nullptr)
{
// 只有dsti对应的顶点不在S集合才能继续判断
if (!S[vNode->_dsti]&&
dist[u] + vNode->_weight < dist[vNode->_dsti])
{
dist[vNode->_dsti] = dist[u] + vNode->_weight;
pPath[vNode->_dsti] = u; // 更新路径
}
vNode = vNode->_next;
}
}
}
template<W W_MAX>
bool BellmanFord(const V& src, vector<W>& dist, vector<int>& pPath)
{
int srci = GetVertexIndex(src);
if (srci == -1)
{
return false;
}
int n = static_cast<int>(_vertexSet.size());
// 初始化dist与pPath
dist.resize(n, W_MAX);
pPath.resize(n, -1);
dist[srci] = W();
for (int k = 0; k < n; k++) // 进行n轮更新即可
{
bool flag = true; // 标识是否有新的短路径产生
for (int i = 0; i < n; i++)
{
Edge* jNode = _table[i];
// 进行松弛更新判断
while (jNode != nullptr)
{
// 如果s->...->i->j < s->...->j成立则更新
if (dist[i] + jNode->_weight < dist[jNode->_dsti])
{
dist[jNode->_dsti] = dist[i] + jNode->_weight;
pPath[jNode->_dsti] = i;
flag = false;
}
jNode = jNode->_next;
}
}
// 如果没有新的短路径产生,则其他的路径也无需进行迭代
if (flag)
{
break;
}
}
// 如果进行了n轮松弛更新还能产生新的短路径则说明有负权值回路
for (int i = 0; i < n; i++)
{
Edge* jNode = _table[i];
while (jNode != nullptr)
{
if (dist[i] + jNode->_weight < dist[jNode->_dsti])
{
return false;
}
jNode = jNode->_next;
}
}
return true;
}
template<W W_MAX>
void FloydWarshall(vector<vector<W>>& vvDist, vector<vector<int>>& vvpPath)
{
int n = static_cast<int>(_vertexSet.size());
// 初始化vvDist与vvpPath
vvDist.resize(n, vector<W>(n, W_MAX));
vvpPath.resize(n, vector<int>(n, -1));
for (int i = 0; i < n; i++)
{
// 对角线置为零
vvDist[i][i] = 0;
Edge* curr = _table[i];
while (curr != nullptr)
{
vvDist[i][curr->_dsti] = curr->_weight;
vvpPath[i][curr->_dsti] = i;
curr = curr->_next;
}
}
// 打印权值和路径矩阵观察数据
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
if (vvDist[i][j] == W_MAX)
{
//cout << "*" << " ";
printf("%3c", '*');
}
else
{
//cout << vvDist[i][j] << " ";
printf("%3d", vvDist[i][j]);
}
}
cout << endl;
}
cout << endl;
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
//cout << vvParentPath[i][j] << " ";
printf("%3d", vvpPath[i][j]);
}
cout << endl;
}
cout << "=================================" << endl;
for (int k = 0; k < n; k++)
{
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
// k顶点所在的行与列及正对角线无需更新
if (k == i || k == j || i == j)
{
continue;
}
if (vvDist[i][k] != W_MAX && vvDist[k][j] != W_MAX
&& vvDist[i][k] + vvDist[k][j] < vvDist[i][j])
{
// 条件满足则进行更新
vvDist[i][j] = vvDist[i][k] + vvDist[k][j];
// 更新直接父路径顶点下标
vvpPath[i][j] = vvpPath[k][j];
}
}
}
// 打印权值和路径矩阵观察数据
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
if (vvDist[i][j] == W_MAX)
{
//cout << "*" << " ";
printf("%3c", '*');
}
else
{
//cout << vvDist[i][j] << " ";
printf("%3d", vvDist[i][j]);
}
}
cout << endl;
}
cout << endl;
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
//cout << vvParentPath[i][j] << " ";
printf("%3d", vvpPath[i][j]);
}
cout << endl;
}
cout << "=================================" << endl;
}
}
};
void TestGraphDijkstra()
{
const char* str = "syztx";
Graph<char, int, true> g(str, strlen(str));
g.AddEdge('s', 't', 10);
g.AddEdge('s', 'y', 5);
g.AddEdge('y', 't', 3);
g.AddEdge('y', 'x', 9);
g.AddEdge('y', 'z', 2);
g.AddEdge('z', 's', 7);
g.AddEdge('z', 'x', 6);
g.AddEdge('t', 'y', 2);
g.AddEdge('t', 'x', 1);
g.AddEdge('x', 'z', 4);
vector<int> dist;
vector<int> pPath;
g.Dijkstra<INT_MAX>('s', dist, pPath);
g.PrintShortPath('s', dist, pPath);
// 图中带有负权路径时,贪心策略则失效了。
// 测试结果可以看到s->t->y之间的最短路径没更新出来
/*const char* str = "sytx";
Graph<char, int, INT_MAX, true> g(str, strlen(str));
g.AddEdge('s', 't', 10);
g.AddEdge('s', 'y', 5);
g.AddEdge('t', 'y', -7);
g.AddEdge('y', 'x', 3);
vector<int> dist;
vector<int> parentPath;
g.Dijkstra('s', dist, parentPath);
g.PrintShortPath('s', dist, parentPath);*/
//const char* str = "syztx";
//Graph<char, int, INT_MAX, true> g(str, strlen(str));
//g.AddEdge('s', 't', 6);
//g.AddEdge('s', 'y', 7);
//g.AddEdge('y', 'z', 9);
//g.AddEdge('y', 'x', -3);
//g.AddEdge('z', 's', 2);
//g.AddEdge('z', 'x', 7);
//g.AddEdge('t', 'x', 5);
//g.AddEdge('t', 'y', 8);
//g.AddEdge('t', 'z', -4);
//g.AddEdge('x', 't', -2);
//vector<int> dist;
//vector<int> parentPath;
//g.Dijkstra('s', dist, parentPath);
//g.PrintShortPath('s', dist, parentPath);
}
void TestGraphBellmanFord()
{
const char* str = "syztx";
Graph<char, int, true> g(str, strlen(str));
g.AddEdge('s', 't', 6);
g.AddEdge('s', 'y', 7);
g.AddEdge('y', 'z', 9);
g.AddEdge('y', 'x', -3);
g.AddEdge('z', 's', 2);
g.AddEdge('z', 'x', 7);
g.AddEdge('t', 'x', 5);
g.AddEdge('t', 'y', 8);
g.AddEdge('t', 'z', -4);
g.AddEdge('x', 't', -2);
vector<int> dist;
vector<int> pPath;
g.BellmanFord<INT_MAX>('s', dist, pPath);
g.PrintShortPath('s', dist, pPath);
//const char* str = "syztx";
//Graph<char, int, true> g(str, strlen(str));
//g.AddEdge('s', 't', 6);
//g.AddEdge('s', 'y', 7);
//g.AddEdge('y', 'z', 9);
//g.AddEdge('y', 'x', -3);
//g.AddEdge('y', 's', 1); // 新增
//g.AddEdge('z', 's', 2);
//g.AddEdge('z', 'x', 7);
//g.AddEdge('t', 'x', 5);
//g.AddEdge('t', 'y', -8); //更改
g.AddEdge('t', 'y', 8);
//g.AddEdge('t', 'z', -4);
//g.AddEdge('x', 't', -2);
//vector<int> dist;
//vector<int> parentPath;
//if (g.BellmanFord<INT_MAX>('s', dist, parentPath))
// g.PrintShortPath('s', dist, parentPath);
//else
// cout << "带负权回路" << endl;
}
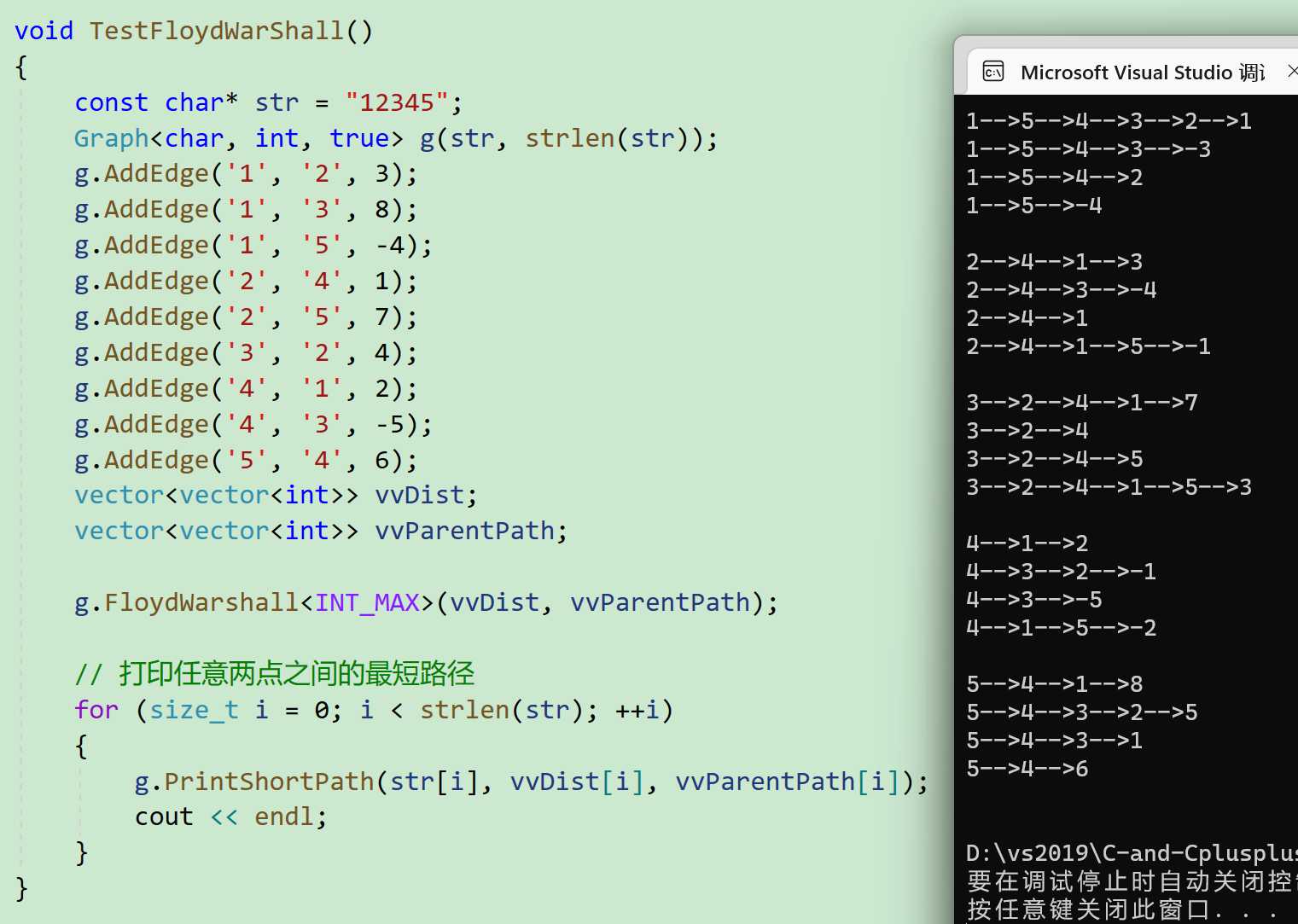
void TestFloydWarShall()
{
const char* str = "12345";
Graph<char, int, true> g(str, strlen(str));
g.AddEdge('1', '2', 3);
g.AddEdge('1', '3', 8);
g.AddEdge('1', '5', -4);
g.AddEdge('2', '4', 1);
g.AddEdge('2', '5', 7);
g.AddEdge('3', '2', 4);
g.AddEdge('4', '1', 2);
g.AddEdge('4', '3', -5);
g.AddEdge('5', '4', 6);
vector<vector<int>> vvDist;
vector<vector<int>> vvParentPath;
g.FloydWarshall<INT_MAX>(vvDist, vvParentPath);
// 打印任意两点之间的最短路径
for (size_t i = 0; i < strlen(str); ++i)
{
g.PrintShortPath(str[i], vvDist[i], vvParentPath[i]);
cout << endl;
}
}
}
int main()
{
//AdjacentList::TestGraphDijkstra();
//AdjacentList::TestGraphBellmanFord();
AdjacentList::TestFloydWarShall();
return 0;
}
邻接矩阵
#define _CRT_SECURE_NO_WARNINGS 1
#include <unordered_set>
#include <functional>
#include <iostream>
#include <cstring>
#include <string>
#include <vector>
#include <stack>
#include <queue>
#include <map>
using namespace std;
namespace AdjacentMatrix
{
template<typename V, typename W, W W_MAX, bool Directed = false>
class Graph
{
private:
std::vector<V> _vertexSet;
std::map<V, int> _vertexIndex;
std::vector<std::vector<W>> _matrix;
public:
typedef Graph<V, W, W_MAX, Directed> Self;
Graph() = default;
Graph(const V* a, int n)
{
for (int i = 0; i < n; i++)
{
AddVertex(a[i]);
}
}
int GetVertexIndex(const V& v)
{
typename std::map<V, int>::iterator pos = _vertexIndex.find(v);
if (pos != _vertexIndex.end())
{
return pos->second;
}
else
{
return -1;
}
}
bool AddVertex(const V& v)
{
// 顶点存在不需要继续增加
if (GetVertexIndex(v) != -1)
return false;
_vertexSet.push_back(v);
_vertexIndex.insert(std::make_pair(v, _vertexSet.size() - 1));
// 先在原有的行上一列
for (int i = 0; i < (int)_matrix.size(); i++)
{
_matrix[i].push_back(W_MAX);
}
// 增加一行
_matrix.push_back(std::vector<W>(_vertexSet.size(), W_MAX));
return true;
}
bool AddEdge(const V& src, const V& dst, const W& weight)
{
int srci = GetVertexIndex(src);
int dsti = GetVertexIndex(dst);
// 顶点不在图中,添加边失败
if (srci == -1 || dsti == -1)
return false;
return _AddEdge(srci, dsti, weight);
}
bool _AddEdge(int srci, int dsti, const W& weight)
{
// 顶点不在图中,添加边失败
if (srci == -1 || dsti == -1)
return false;
_matrix[srci][dsti] = weight;
// 如果为无向图,则需要再添加一条dst->src的边
if (!Directed)
{
_matrix[dsti][srci] = weight;
}
return true;
}
void PrintShortPath(const V& src, const vector<W>& dist, const vector<int>& pPath)
{
int srci = GetVertexIndex(src);
if (srci == -1)
{
return;
}
int n = (int)_vertexSet.size();
for (int i = 0; i < n; i++)
{
if (i != srci)
{
int p = i;
vector<int> v;
// 先获取源点s到某顶点的路径
while (pPath[p]!=-1)
{
v.push_back(p);
p = pPath[p];
}
v.push_back(p);
// 打印路径和对应的代价
for (int j = (int)(v.size() - 1); j >= 0; j--)
{
std::cout << _vertexSet[v[j]] << "-->";
}
std::cout << dist[i] << std::endl;
}
}
}
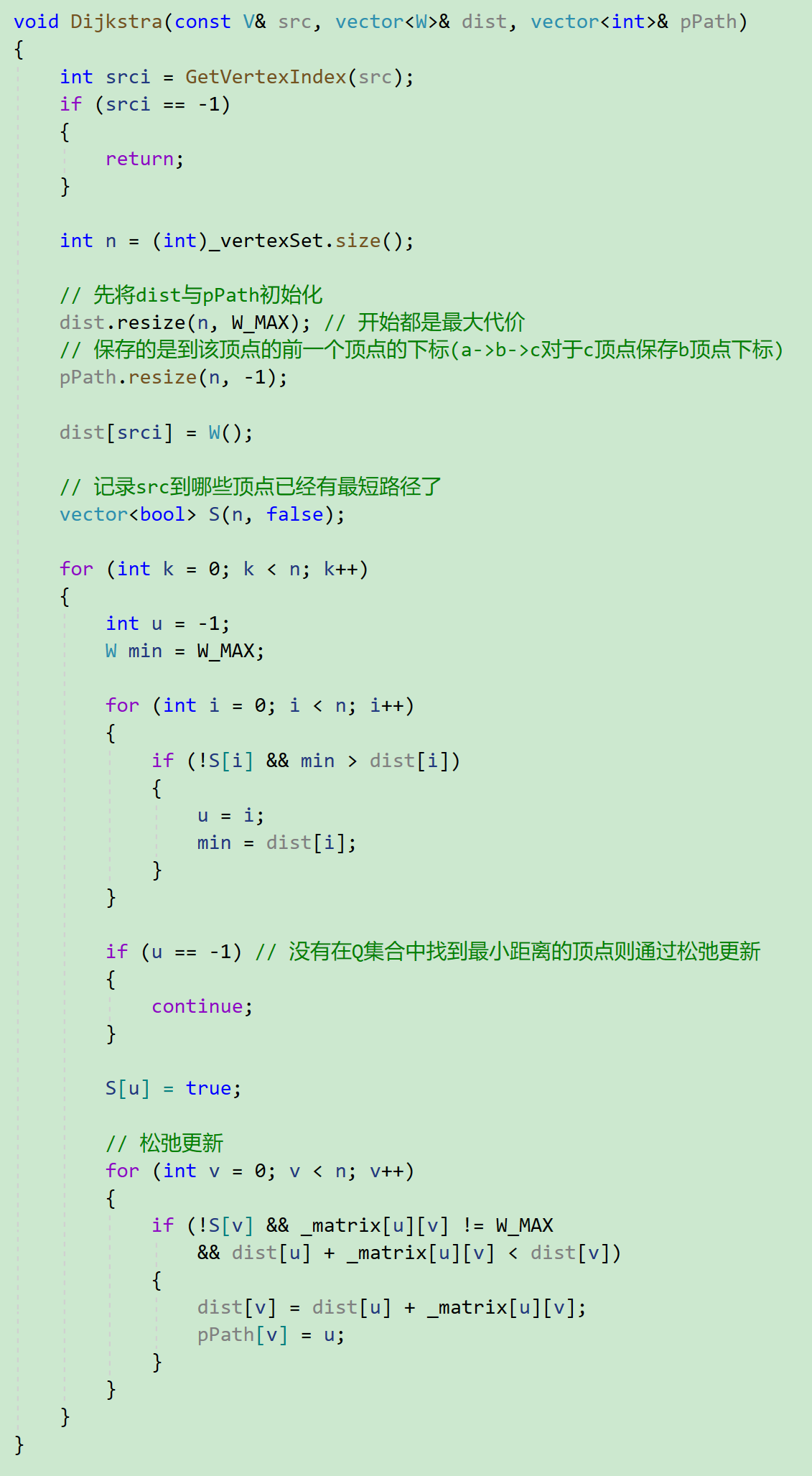
void Dijkstra(const V& src, vector<W>& dist, vector<int>& pPath)
{
int srci = GetVertexIndex(src);
if (srci == -1)
{
return;
}
int n = (int)_vertexSet.size();
// 先将dist与pPath初始化
dist.resize(n, W_MAX); // 开始都是最大代价
// 保存的是到该顶点的前一个顶点的下标(a->b->c对于c顶点保存b顶点下标)
pPath.resize(n, -1);
dist[srci] = W();
// 记录src到哪些顶点已经有最短路径了
vector<bool> S(n, false);
for (int k = 0; k < n; k++)
{
int u = -1;
W min = W_MAX;
for (int i = 0; i < n; i++)
{
if (!S[i] && min > dist[i])
{
u = i;
min = dist[i];
}
}
if (u == -1) // 没有在Q集合中找到最小距离的顶点则通过松弛更新
{
continue;
}
S[u] = true;
// 松弛更新
for (int v = 0; v < n; v++)
{
if (!S[v] && _matrix[u][v] != W_MAX
&& dist[u] + _matrix[u][v] < dist[v])
{
dist[v] = dist[u] + _matrix[u][v];
pPath[v] = u;
}
}
}
}
bool BellmanFord(const V& src, vector<W>& dist, vector<int>& pPath)
{
int srci = GetVertexIndex(src);
if (srci == -1)
{
return false;
}
int n = (int)_vertexSet.size();
// 记录srci到其他顶点最短路径权值数组,开始都是最大代价
dist.resize(n, W_MAX);
// 保存的是到该顶点的前一个顶点的下标(a->b->c对于c顶点保存b顶点下标)
pPath.resize(n, -1);
// 先更新srci->srci为缺省值
dist[srci] = W();
// 总体最多更新n轮
for (int k = 0; k < n; k++)
{
int flag = true;
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
// 判断核心思想是否成立:如果s->...->i->j < s->...->j成立则更新
if (_matrix[i][j] != W_MAX && dist[i] + _matrix[i][j] < dist[j])
{
dist[j] = dist[i] + _matrix[i][j];
pPath[j] = i;
flag = false;
}
}
}
if (flag) // 如果没再更新出最短路径,则后续轮次就不需要再走了
{
break;
}
}
// 检查是否有负权值回路问题, 还能更新就是带负权回路
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
if (_matrix[i][j] != W_MAX && dist[i] + _matrix[i][j] < dist[j])
{
return false;
}
}
}
return true;
}
void FloydWarshall(vector<vector<W>>& vvDist, vector<vector<int>>& vvpPath)
{
int n = static_cast<int>(_vertexSet.size());
vvDist.resize(n, vector<W>(n, W_MAX));
vvpPath.resize(n, vector<int>(n, -1));
// 初始化vvDist
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
if (i == j) // 对角线置为0,int()==0
{
vvDist[i][j] = W();
}
else if (_matrix[i][j] != W_MAX)
{
vvDist[i][j] = _matrix[i][j];
vvpPath[i][j] = i;
}
}
}
for (int k = 0; k < n; k++)
{
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
if (k == i || k == j || i == j)
{
continue;
}
// 更新迭代
if (vvDist[i][k]!=W_MAX && vvDist[k][j]!=W_MAX&&
vvDist[i][k] + vvDist[k][j] < vvDist[i][j])
{
vvDist[i][j] = vvDist[i][k] + vvDist[k][j];
vvpPath[i][j] = vvpPath[k][j];
}
}
}
}
}
};
void TestGraphDijkstra()
{
const char* str = "syztx";
Graph<char, int, INT_MAX, true> g(str, strlen(str));
g.AddEdge('s', 't', 10);
g.AddEdge('s', 'y', 5);
g.AddEdge('y', 't', 3);
g.AddEdge('y', 'x', 9);
g.AddEdge('y', 'z', 2);
g.AddEdge('z', 's', 7);
g.AddEdge('z', 'x', 6);
g.AddEdge('t', 'y', 2);
g.AddEdge('t', 'x', 1);
g.AddEdge('x', 'z', 4);
vector<int> dist;
vector<int> pPath;
g.Dijkstra('s', dist, pPath);
g.PrintShortPath('s', dist, pPath);
图中带有负权路径时,贪心策略则失效了。
测试结果可以看到s->t->y之间的最短路径没更新出来
//const char* str = "sytx";
//Graph<char, int, INT_MAX, true> g(str, strlen(str));
//g.AddEdge('s', 't', 10);
//g.AddEdge('s', 'y', 5);
//g.AddEdge('t', 'y', -7);
//g.AddEdge('y', 'x', 3);
//vector<int> dist;
//vector<int> parentPath;
//g.Dijkstra('s', dist, parentPath);
//g.PrintShortPath('s', dist, parentPath);
const char* str = "syztx";
Graph<char, int, INT_MAX, true> g(str, strlen(str));
g.AddEdge('s', 't', 6);
g.AddEdge('s', 'y', 7);
g.AddEdge('y', 'z', 9);
g.AddEdge('y', 'x', -3);
g.AddEdge('z', 's', 2);
g.AddEdge('z', 'x', 7);
g.AddEdge('t', 'x', 5);
g.AddEdge('t', 'y', 8);
g.AddEdge('t', 'z', -4);
g.AddEdge('x', 't', -2);
vector<int> dist;
vector<int> parentPath;
g.Dijkstra('s', dist, parentPath);
g.PrintShortPath('s', dist, parentPath);
}
void TestGraphBellmanFord()
{
const char* str = "syztx";
Graph<char, int, INT_MAX, true> g(str, strlen(str));
g.AddEdge('s', 't', 6);
g.AddEdge('s', 'y', 7);
g.AddEdge('y', 'z', 9);
g.AddEdge('y', 'x', -3);
g.AddEdge('z', 's', 2);
g.AddEdge('z', 'x', 7);
g.AddEdge('t', 'x', 5);
g.AddEdge('t', 'y', 8);
g.AddEdge('t', 'z', -4);
g.AddEdge('x', 't', -2);
vector<int> dist;
vector<int> pPath;
g.BellmanFord('s', dist, pPath);
g.PrintShortPath('s', dist, pPath);
//const char* str = "syztx";
//Graph<char, int, INT_MAX, true> g(str, strlen(str));
//g.AddEdge('s', 't', 6);
//g.AddEdge('s', 'y', 7);
//g.AddEdge('y', 'z', 9);
//g.AddEdge('y', 'x', -3);
g.AddEdge('y', 's', 1); // 新增
//g.AddEdge('z', 's', 2);
//g.AddEdge('z', 'x', 7);
//g.AddEdge('t', 'x', 5);
g.AddEdge('t', 'y', -8); //更改
//g.AddEdge('t', 'y', 8);
//g.AddEdge('t', 'z', -4);
//g.AddEdge('x', 't', -2);
//vector<int> dist;
//vector<int> parentPath;
//if (g.BellmanFord('s', dist, parentPath))
// g.PrintShortPath('s', dist, parentPath);
//else
// cout << "带负权回路" << endl;
}
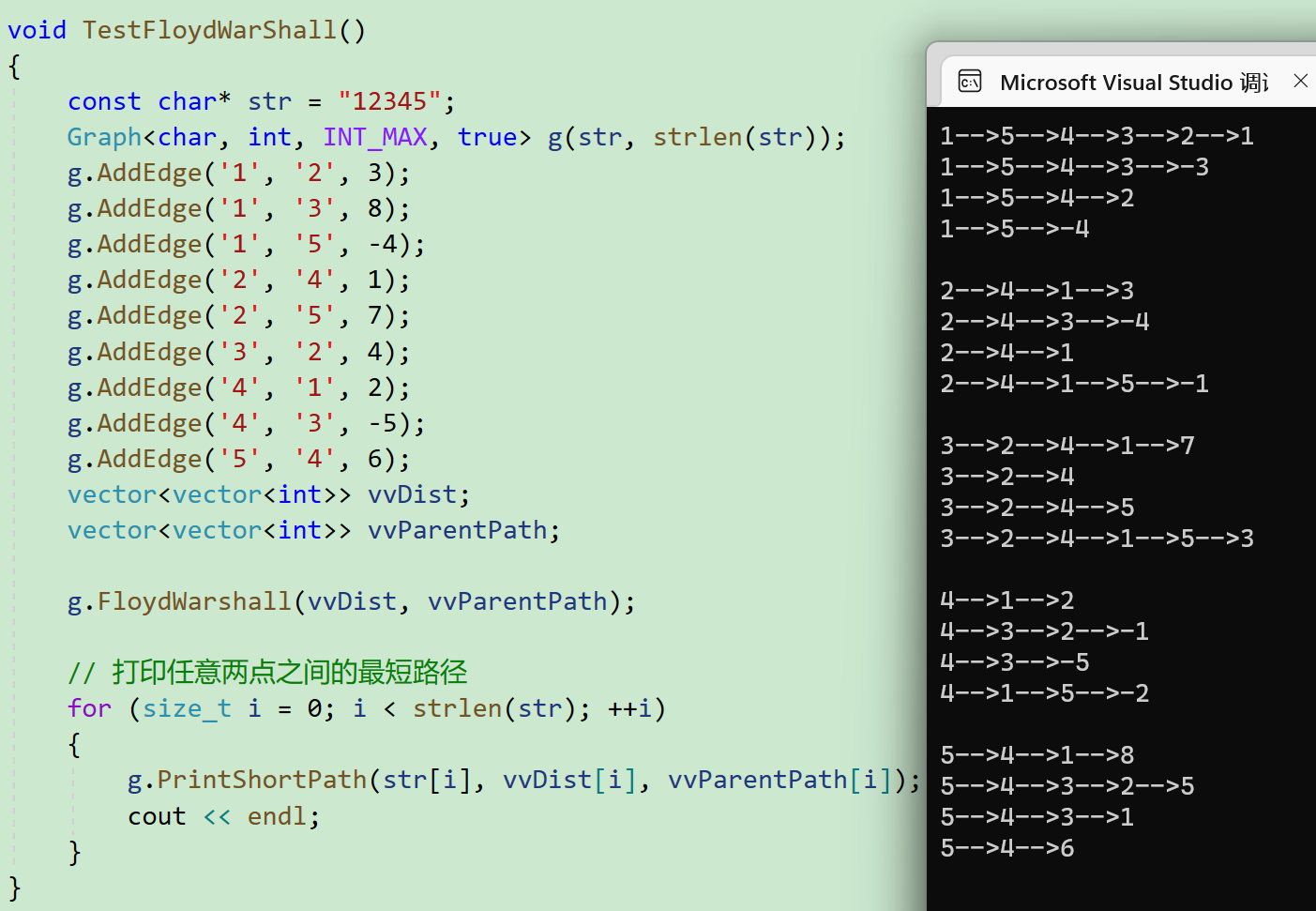
void TestFloydWarShall()
{
const char* str = "12345";
Graph<char, int, INT_MAX, true> g(str, strlen(str));
g.AddEdge('1', '2', 3);
g.AddEdge('1', '3', 8);
g.AddEdge('1', '5', -4);
g.AddEdge('2', '4', 1);
g.AddEdge('2', '5', 7);
g.AddEdge('3', '2', 4);
g.AddEdge('4', '1', 2);
g.AddEdge('4', '3', -5);
g.AddEdge('5', '4', 6);
vector<vector<int>> vvDist;
vector<vector<int>> vvParentPath;
g.FloydWarshall(vvDist, vvParentPath);
// 打印任意两点之间的最短路径
for (size_t i = 0; i < strlen(str); ++i)
{
g.PrintShortPath(str[i], vvDist[i], vvParentPath[i]);
cout << endl;
}
}
}
int main()
{
//AdjacentMatrix::TestGraphDijkstra();
//AdjacentMatrix::TestGraphBellmanFord();
AdjacentMatrix::TestFloydWarShall();
return 0;
}
相关文章
- Js逆向-猿人学(3-4)访问逻辑-样式干扰
- js逆向-猿人学(5)乱码混淆增强
- Js逆向の参数定位方法
- js逆向-猿人学(6)混淆回溯
- js逆向-猿人学(7-8)动态字体-图文点选
- js逆向-猿人学(9)动态cookie困难版
- js逆向-猿人学(10-11)js和app协议破解
- js逆向-猿人学(12-13)简易Js
- Selenium提高:JS操作和cookie处理
- 011:Django高级表单
- 020:Django电商网站逻辑导图
- Django:models查询和前后端交互
- Web机器人记录访问地和避免在动态虚拟web空间的循环和重复
- http和https代理IP的区别
- HTTP状态码
- LiteFlow组件式流程引擎框架
- 常见的WebGIS地图库
- 基于eos的Dapp开发--元素战争(三)
- Vue 超实用方法,效率提升80%
- Vue 8种组件通信方式