
2023年 beagle bone black教程4-串口的使用
beagle bone black教程4-串口的使用
1. 简单使用
BeagleBone有六个板载串行端口。其中串口0已经被系统占用为串口终端了。在 BeagleBone Black wireless上,驱动好像都已经启用了。(debian 版本10.0)
我们进入设备文件夹观察。
cd /dev/
ls
可以看到有好多设备。其中ttyO0-ttyO5即我们要找的串口。

如果看不清,可以使用ls ttyO*,这样只列出ttyO开头的文件。

UART 映射到引脚和设备,如下所示:
| RX | TX | CTS | RTS | Device | 注释 | |
|---|---|---|---|---|---|---|
| UART0 | J1_4 | J1_5 | /dev/ttyO0 | 系统终端 | ||
| UART1 | P9_26 | P9_24 | P9_20 | P9_19 | /dev/ttyO1 | |
| UART2 | P9_22 | P9_21 | P8_37 | P8_38 | /dev/ttyO2 | |
| UART3 | P9_42 | P8_36 | P8_34 | /dev/ttyO3 | 仅限 TX | |
| UART4 | P9_11 | P9_13 | P8_35 | P8_33 | /dev/ttyO4 | |
| UART5 | P8_38 | P8_37 | P8_31 | P8_32 | /dev/ttyO5 |
这个引脚是怎么看到的呢,通过设备数可以观察。
cd /lib/firmware
ls
 你会看到很多的设备树,这里我们只关心串口
你会看到很多的设备树,这里我们只关心串口
ls BB-UART* #只列出BB-UART开头的文件

这里BB-UARTx-00A0.dtbo 格式的为我们所使用的。至于名字带有RTSCTS的是啥就不清楚了,问题不大。
我们打开一个文件看看。
cat BB-UART4-00A0.dtbo

有乱码,不重要。我们还是可以看到信息的:P9.13 和P9.11就是所用串口的引脚。
为了让串口能用,我们需要先使能( 如果不使能,永远用不了,曾因此耗费了一天时间)。需要对/boot/uEnv.txt文件进行更改。添加如下语句。
# UART 1
uboot_overlay_addr0=/lib/firmware/BB-UART1-00A0.dtbo
# UART 2
uboot_overlay_addr1=/lib/firmware/BB-UART2-00A0.dtbo
# UART 4
uboot_overlay_addr2=/lib/firmware/BB-UART4-00A0.dtbo
# UART 5
uboot_overlay_addr3=/lib/firmware/BB-UART5-00A0.dtbo
# UART 3 (only TX). Note that in "uboot_overlay_addrX", the X need not be = UART id
uboot_overlay_addr4=/lib/firmware/BB-UART3-00A0.dtbo
另外,在文件末尾可能要加下面这句话(它是注释状态,所以应该没有影响,如果有问题再把注释去掉看看)
#cape_enable=capemgr.enable_partno=BB-UART1,BB-UART2,BB-UART4,BB-UART5
打开文件并添加。
sudo nano /boot/uEnv.txt
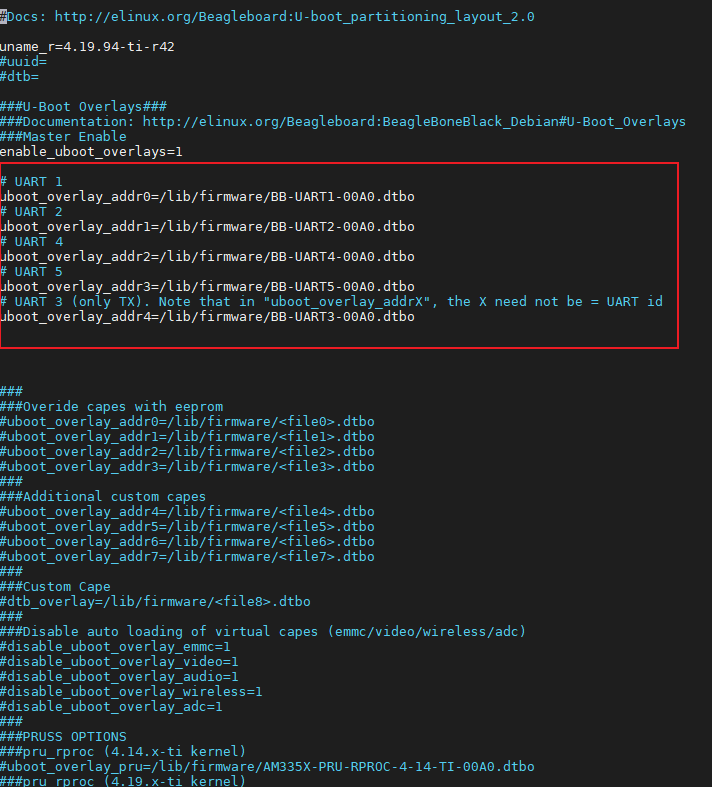
如图便配置好了。图中使能了UART1-UART5,平时按需使能就好。这些配置使用的是默认的引脚。默认波特率为9600。
需要重启生效
使用USB-TTL模块连接 UART2的RX和TX(P9.22 和 P9.21)。
在串口终端往串口2写数据
echo "hello I am UART 2" > /dev/ttyO2
在串口调试助手(连接USB-TTL模块),可以看到如下画面。
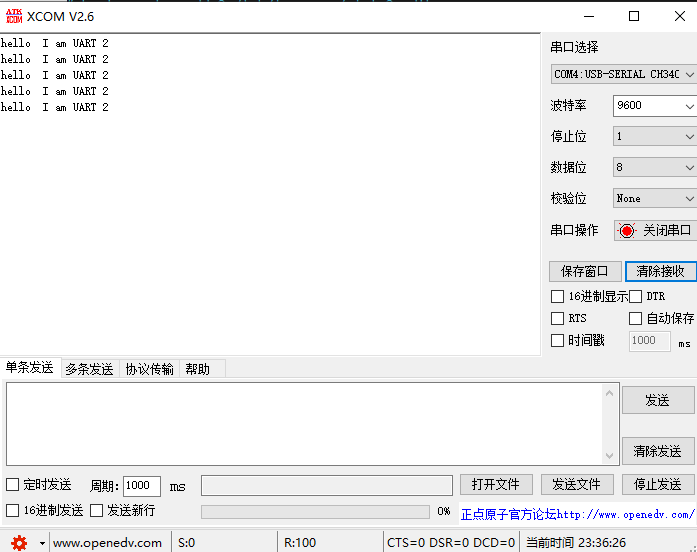
ok,没有问题。
2. 基本编程发送
直接上代码
#include <fcntl.h>
#include <termios.h>
#include <unistd.h>
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
int uart_fd;
void uart4_init(void)
{
uart_fd = open("/dev/ttyO4",O_RDWR|O_NOCTTY|O_NONBLOCK);//可读写 非终端设备 不阻塞(不加这个有时候会卡死)
if(uart_fd < 0) {
perror("open error");
exit(-1);
}
struct termios new_cfg;
memset(&new_cfg,0,sizeof(struct termios));
cfmakeraw(&new_cfg);//配置为原生模式
new_cfg.c_cflag |= CREAD;//接受使能
cfsetspeed(&new_cfg,B115200);//波特率115200
new_cfg.c_cflag &= ~CSIZE; //将数据位相关的比特位清零
new_cfg.c_cflag|=CS8;//8 位bites
new_cfg.c_cflag &= ~PARENB;//无校验位
new_cfg.c_iflag &= ~INPCK;//无校验位
new_cfg.c_cflag&= ~CSTOPB;//1个停止位
new_cfg.c_cc[VTIME] = 0;//不等待。 单位 0.1s
new_cfg.c_cc[VMIN] = 0;//最小等待接收字符数量0 不等待
tcflush(uart_fd,TCIOFLUSH);//清除缓冲
tcsetattr(uart_fd,TCSANOW,&new_cfg);//配置生效
}
int main(void)
{
printf("start
");
uart4_init();
while(1){
printf("work
");
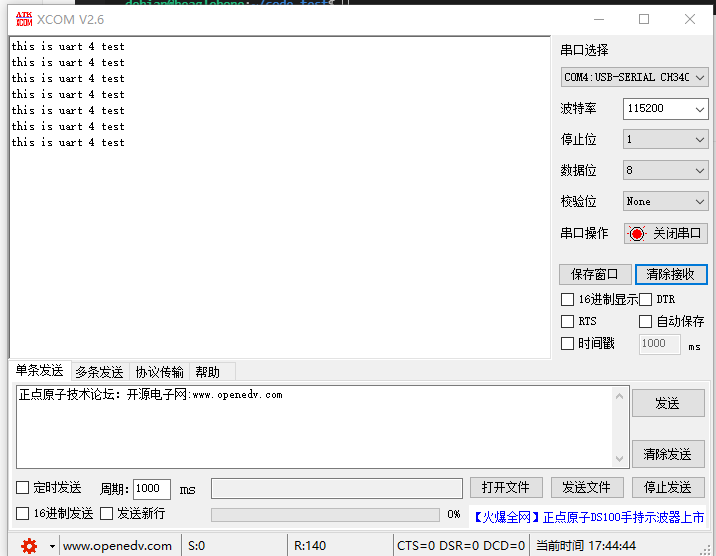
write(uart_fd,"this is uart 4 test
",20);
sleep(1);
}
}
在vscode终端里,编译与执行(你用环境或者文件名与我不一样就自行操作 )
cd ~/code_test/
gcc -o uart uart.c
./uart
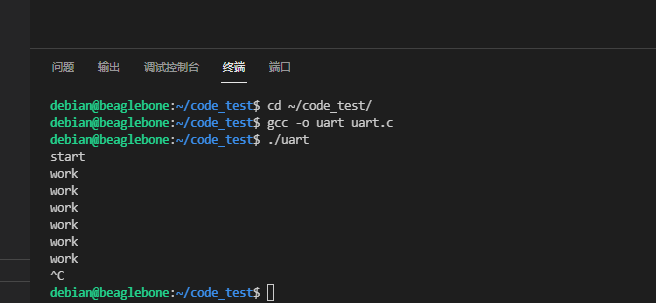
如果有乱码。重启板子即可。
3.编程+poll接收
/************************* uart_poll.c ****************************/
#include <fcntl.h>
#include <termios.h>
#include <unistd.h>
#include <signal.h>
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <pthread.h>
int uart_fd;
void thread_uart_start(void);
static void uart_handle(unsigned char res);
void uart4_init(void)
{
uart_fd = open("/dev/ttyO4",O_RDWR|O_NOCTTY|O_NONBLOCK);//串口3 可读可写 非终端模式 不阻塞(不加这个可能有问题)
if(uart_fd < 0) perror("open error");
struct termios new_cfg;
memset(&new_cfg,0,sizeof(struct termios));
cfmakeraw(&new_cfg); //配置为原生模式
new_cfg.c_cflag |= CREAD;//接受使能
cfsetspeed(&new_cfg,B115200);//波特率115200
new_cfg.c_cflag &= ~CSIZE; //将数据位相关的比特位清零
new_cfg.c_cflag|=CS8;//8 位bites
new_cfg.c_cflag &= ~PARENB;//无校验位
new_cfg.c_iflag &= ~INPCK;//无校验位
new_cfg.c_cflag&= ~CSTOPB;//1个停止位
new_cfg.c_cc[VTIME] = 0;//不等待。此时对串口得操作为非阻塞模式
new_cfg.c_cc[VMIN] = 0;//对接收字符没有要求
tcflush(uart_fd,TCIOFLUSH);//清除缓冲
tcsetattr(uart_fd,TCSANOW,&new_cfg);//配置生效
}
void thread_uart_start(void)
{
printf("uart thread started
");
uart4_init();
struct pollfd fds;
fds.fd=uart_fd; //串口
fds.events=POLLIN; //
fds.revents=0;//
while(1){
int ret=poll(&fds,1,-1);//2 表示fds里元素个数为1 -1为一直阻塞 阻塞接收数据
if(ret<0) perror("poll error");
if(fds.revents & POLLIN){//串口有数据
unsigned char buf;
ret = read(uart_fd,&buf,1);
if(ret>0) printf("串口读取%d bytes
",ret);//打印数据个数
uart_handle(buf);
}
}
}
static void uart_handle(unsigned char res)
{
static int i=0;
static unsigned char buf[50];
i++;
printf("%d rer:%c
",i,res);//打印数据
}
int main(void)
{
pthread_t tid_uart;
pthread_create(&tid_uart, NULL, (void *)thread_uart_start, NULL);//创建串口接收线程
while(1)
{
sleep(1);
printf("I am running
");
write(uart_fd, "test
", 5);
}
}
gcc -o uart_poll uart_poll.c -lpthread
./uart_poll
就是板子间隔一段时间打印一次“I am running”,然后往串口写入:“test”。 如果串口中断有接收,则把它打印出来。
相关文章
- 【技术种草】cdn+轻量服务器+hugo=让博客“云原生”一下
- CLB运维&运营最佳实践 ---访问日志大洞察
- vnc方式登陆服务器
- 轻松学排序算法:眼睛直观感受几种常用排序算法
- 十二个经典的大数据项目
- 为什么使用 CDN 内容分发网络?
- 大数据——大数据默认端口号列表
- Weld 1.1.5.Final,JSR-299 的框架
- JavaFX 2012:彻底开源
- 提升as3程序性能的十大要点
- 通过凸面几何学进行独立于边际的在线多类学习
- 利用行动影响的规律性和部分已知的模型进行离线强化学习
- ModelLight:基于模型的交通信号控制的元强化学习
- 浅谈Visual Source Safe项目分支
- 基于先验知识的递归卡尔曼滤波的代理人联合状态和输入估计
- 结合网络结构和非线性恢复来提高声誉评估的性能
- 最佳实践丨云开发CloudBase多环境管理实践
- TimeVAE:用于生成多变量时间序列的变异自动编码器
- 具有线性阈值激活的神经网络:结构和算法
- 内网渗透之横向移动 -- 从域外向域内进行密码喷洒攻击