
期末复习——进程
MEMO
- PCB块:进程存在唯一唯一唯一!标志
- 程序静态,进程动态
- 每个进程有
UID:用户ID,进程创建者的ID;通常大于500
EUID:有效用户ID,表示进程对文件资源的访问权限;- setuid:对二进制文件执行setuid,任何用户执行时都以setuid程序文件所属用户权限去执行;(用户uid执行passwd命令时,euid=root ID=0)
- PC程序计数器: PC总是指向下一条将要取指的指令地址。CPU总是按照PC的指向对指令序列进行取指、译码和执行。PC决定了程序运行流向。
- 原语:不可中断的一段程序。注意,像赋值操作一般都是原子操作
i++;int i=2;这样的
进程
一次只有一个进程在一个处理器上运行。
进程是资源拥有的资本单位;线程是CPU调度的基本单位
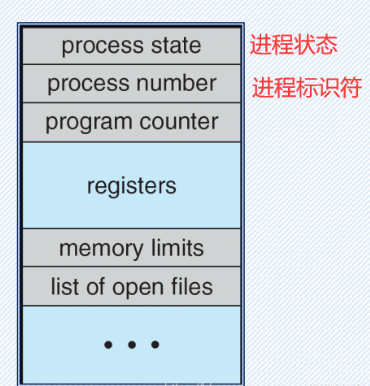
- PCB块:包含①进程状态(5种)、②进程编号、③PC程序计数器、④寄存器、⑤内存界限、⑥打开文件列表……还有CPU调度信息内存管理信息、记账信息(CPU时间、等等)、I/O状态信息(分配到的I/O设备列表、打开文件列表)
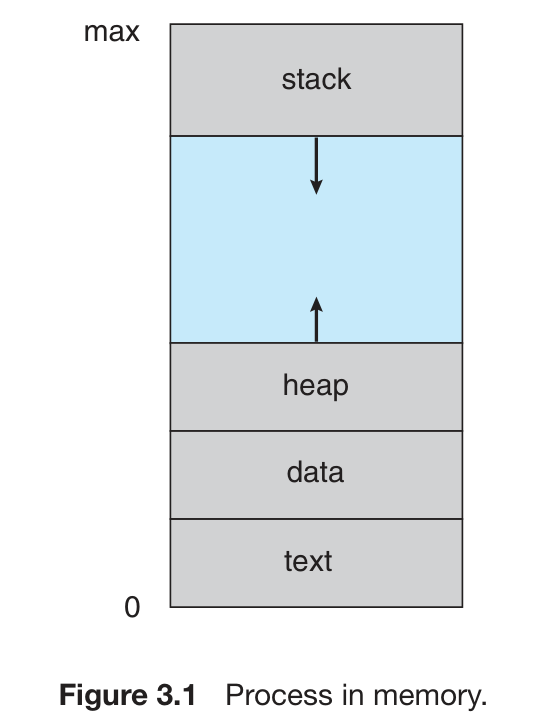
- 进程的内存结构:①栈(向低地址生长)、②堆(向高地址生长)、③数据段(全局变量)、④文本段/代码段、⑤PC程序计数器的值
1.进程调度
1.1调度队列
- 作业队列:所有进程
- 就绪队列;
- 设备队列:每个设备都有自己的设备队列,e.g.I/O设备队列:等待I/O操作。
1.2进程调度程序
调度器/调度程序执行。
调度程序将CPU控制 交给 短期调度程序选择的进程。
要切换上下文-->切换用户模式-->跳转到用户程序合适的位置重启程序。
- 长期调度程序(作业调度):从缓冲池选择进程加入内存。选择合适的I/O、CPU密集型进程组合,使得V创建进程 = V进程离开系统
频率低 - 短期调度程序(CPU调度程序):从ready队列中取出一个进程,并分配CPU。频率高。
- 运行-->阻塞:I/O请求、wait()等待子进程终止、系统调用申请某资源 资源还未被申请到时
- 运行-->就绪:中断、时间片到期、被高优先级进程抢占
- 阻塞-->就绪:I/O完成、申请的资源已分配;
- 进程终止
- 中期调度程序(内存调度):swap 降低多道程序程度,提高内存利用率、吞吐量挂起一些暂时不能运行的进程到外存等待(阻塞态),后面再调回来加入ready队列(就绪态)。
1.3进程状态切换
-
运行态:正在占用CPU运行ing;
-
就绪态:在ready就绪队列中排队等待CPU
-
阻塞态:e.g.在等待I/O
-
创建态:new正在创建
-
终止态:进程完成执行。
-
就绪态-->运行态:被CPU调度,获得CPU资源开始运行;
-
运行态-->就绪态:时间片用完、更高优先级进程抢占
-
运行态-->阻塞态:主动、请求某一资源、等待I/O操作完成
-
阻塞态-->就绪态:被动I/O完成、中断结束
1.4 CPU上下文切换/进程间CPU切换
上下文切换:从进程A切换到进程B运行;
PCB信息:寄存器值、进程状态、内存管理信息等等
-
上下文切换流程:A状态保存、B状态恢复
- 进程0running,挂起进程0:保存状态到PCB0
- 进程1执行,从PCB1加载状态
- CPU跳转到PCB1的PC指向位置执行
-
上下文切换 与 进程调度:调度是一种决策行为,决定资源分配给哪个进程;
而上下文切换是执行行为。懂了吧 -
进程间CPU切换:中断/陷阱(异常)
- 进程0running,中断or系统调用;
- 挂起进程0:保存状态到PCB0;
- 进程1执行,从PCB1加载状态;
- 中断or系统调用;
- 挂起进程1:保存状态到PCB1;
- 进程0恢复执行,从PCB0加载状态
上下文切换时间是纯粹的时间开销,与硬件支持密切相关。
1.5 移动操作系统的多任务
- 移动操作系统:
- iOS:前台应用程序+后台应用程序;
可能会限制多任务。- 前台应用程序:打开的屏幕显示的应用程序
- 后台应用程序:位于内存但不占用屏幕的应用程序
- Android:对需要后台处理的应用程序,该应用程序使用服务(独立的应用程序组件),服务没有用户界面、占用内存少。
高效的多任务支持。
- iOS:前台应用程序+后台应用程序;
1.6 进程调度原则
使这些量尽量优化,平均值尽量优。当然要综合目的(保证用户收到的服务质量:响应时间↓↓)
- CPU使用率↑:使CPU尽量忙
- 吞吐量↑:throughput = 完成进程数量/单位时间
- 周转时间↓(不是最佳准则:= T 进程完成 - T进程提交 = 在CPU执行时间+在ready队列等待时间+I/O执行时间+阻塞时间(大杂烩)
- 等待时间↓:在ready队列中时间之和。SJF最短作业优先调度算法最佳
- 响应时间:提交进程<-->产生第一响应 期间的时间。
1.7 调度算法
短期调度程序(CPU调度程序) 在ready队列中选择进程的方法
1.7.1 FIFO/FCFS
先来先服务
- 缺:平均等待时间长
护航效果:队列里的短进程都在等那个正在执行的长进程,等待长进程释放CPU,这样CPU、设备利用率↓↓。
1.7.2 SJF最短作业优先调度算法
最短CPU优先执行,平均等待时间最小。
可抢占、可不抢占。
- 用起来很困难,要知道一个进程的执行时间,so一般SJF只是一个判断用的媒介
- 指数平均预测方法:Tn+1 = αtn + (1-α)Tn
- Tn+1:下一次CPU执行预测值
- tn:第n个CPU执行长度
- Tn:存储过去历史
so,α→1:说明更侧重最近历史
α→0:说明更侧重历史
1.7.3 优先级调度算法
会出现饿死的情况:来的都是高优先级的,一直挤你(要看抢占or非抢占),一直在队尾...可怜。
↑可以用老化解决,随时间增高优先级这样。
- 注意是大数高优先级or小数高优先级。坑啊
1.7.4 RR轮转调度算法
抢占的
时间片T,运行中进程A运行时间>T,则中断、上下文切换,A回队尾。
- 不会有进程连续分到时间片(除非只有它一个进程了)-->抢占的
- 极端情况
- 时间片太大:→FIFO
- 时间片太短:上下文切换太频繁,开销大,没意义。-->时间片>>上下文切换时间
1.7.5 多级队列调度算法
ready队列分成多个单独队列。有各自的调度算法。
1.7.6 多级反馈队列调度算法
允许进程在队列中迁移
- 过多使用CPU-->去低优先级队列
- 等待过长-->去高优先级队列
- I/O密集型 and 交互进程-->高优先级队列
2. 进程运行
2.1 创建进程
- 进程树:父进程 --创建--> 子进程
- pid进程标识符:每个进程唯一。
- init进程(pid = 1):Linux系统所有进程的父进程
开机后创建各类用户进程- kthreadd(pid=2):创建额外进程
- Web服务器、打印服务器
ps -el:列出当前系统中所有活动进程完整信息
2.1.1子进程
fork()时父进程会阻塞!!从CPU中离开。
- 获取资源
- 从OS直接获取资源
- 从父进程获得资源子集
- 执行方式
- 可能父子进程并发执行
- 可能父进程等待,知道某个子进程完全执行完
- 子进程地址空间
- 是父进程复制品、有和父进程完全一致的程序和数据。
e.g.fork()允许父子进程轻松通信。
子进程内 系统调用fork() return 0;
而父进程内返回值 = 子进程pid 非0; - 子进程加载另一个新程序
- 如果fork()之后调用exec(),
- pid不变
- 以新程序取代进程空间,堆栈、代码段都改写;当前剩下代码不再执行;
- 失败return -1 成功无返回
- 如果fork()之后调用exec(),
- 是父进程复制品、有和父进程完全一致的程序和数据。
- Linux/Windows:fork()不用传递参数,CreateProcess()要传至少10个参数。
2.1.2 创建原语:进程创建过程
- 为新进程分配唯一pid,申请空白PCB块(PCB块有限);
- 分配资源:内存、I/O、文件等。从OS or 父进程获得
- 初始化PCB块
- 加入ready队列
2.2创建终止
- 终止事件:
- 正常结束,任务完成
也可以是进程调用exit()请求删除自己 - 异常结束:非法指令、运行超时、I/O故障等等
- 外界干预:如操作员系统干预
- 正常结束,任务完成
- 父进程调用wait() 或 pid = waitpid(-1
/*pid*/, NULL, 0),把自己调出ready队列,直到所有子进程终止。 - wait(pid) 或 waitpid(pid, NULL, 0) pid>0则等待指定进程终止
- 级联终止:通常由OS启动,父进程终止,其所有子进程也终止。OS不允许无父进程的子进程在系统内。
- 僵尸进程:子进程终止,但父进程还没调用wait(),短暂存在。等待父进程调用wait()。
- 孤儿进程:父进程没有调用wait()就终止。init()进程会定期调用wait()。
2.2.1终止原语:进程终止过程
- 根据pid检索PCB块,读该pid进程的状态;
- 若还在running,立即终止,让出CPU
- 将子进程都终止;
- 释放其资源给父进程 or OS
- PCB从其队列中删除
3. IPC 进程间通信
共享内存、消息传递、管道通信
3.1 共享内存
e.g.生产者消费者模型
ps.进程内多线程自然共享进程 空间
对共享内存进行写or读操作时,要使用同步互斥工具(信号量操作等等)进行控制。
- 缓冲区 buffer:允许生产者进程、消费者进程并发执行。
- 无界缓冲区:不限制缓冲区大小
- 有界缓冲区:可用循环队列实现,
0 ~ N-1- buffer is empty:
in == out - buffer is full:
(in + 1)%BUFFER_SIZE
- buffer is empty:
3.1.1 POSIX 共享内存
- 创建共享内存对象:shm_fd = shm_open(naem名字, O_create对象不存在时创建 | O_RDRW打开读写权限, 0666目录权限)
- 设置共享内存大小:ftruncate(shm_fd文件描述符,4096字节单位)
- mmp()创建内存映射文件;
- 写入共享内存:sprintf()
3.2 消息传递
e.g.微内核(Mach OS)采用,当前IPC最常用方式。
-
适用少量数据,不同避免冲突;适用分布式系统、计算机网络。
-
单位:格式化消息message
- 定长消息:更复杂的系统级实现,编写简单。
- 变长消息:编写稍难
-
两个原语操作
- 发送消息
- 接收消息
3.2.0 消息传递的同步/阻塞
涉及原语的设计。毕竟是原子操作。
同步--阻塞,异步--非阻塞
- 阻塞发送:send的过程一直阻塞,直到被接收才恢复;
- 非阻塞发送:send完立即进行下一步;
- 阻塞接收:receieve的过程一直阻塞,接收完恢复;
- 非阻塞接收:receive一个空值or一串消息,马上下一步
收发双方的模式互不影响,独立的。
3.2.1 直接通信
两个原语:send、receive
- 寻址对称性:一定要指定对方
- 发送进程Q发送消息给P:send(P, message)
- 挂在接收进程.消息队列上
- 接收进程P从自己的消息队列上取出消息 receive(Q, message)
- 变形-->寻址非对称性:发送方指定即可
- 发送进程Q发送消息给P:send(P, message)
- 接收进程P收消息可以是任何进程发来的,不一定是Q发的,id被设置成对方通信进程的名称 receive(id, message)
3.2.2 间接通信
- 发送进程发送消息给中间实体(常称为:信箱)
- 接收进程从中间实体上取出消息
- 广泛用于计算机网络中。像什么邮箱啊,好理解了吧。
3.2.3 管道通信 pipe
消息传递的一种特殊方式。
- 管道:pipe文件。一个读进程 一个写进程之间的共享文件。
3.2.3.1 普通管道
也叫匿名管道。允许一对进程通信。
通信进程双方具有父子关系。
fd[0]管道读出端fd[1]管道写入端,毕竟pipe是文件属性嘛,有文件描述符- 单向,如果需要双向,设置两个管道。-->半双工
3.2.3.2命名管道
通信双向,半双工,可多个进程之间通信。UNIX中命名管道叫FIFO,mkfifo()创建,直到被显示删除都一直存在。
- 如果要全双工-->建立两个FIFO。
不同系统之间,使用socket套接字。
ps.Windows的命名管道更丰富,支持全双工通信,可不同机器。
3.2.4 Mach OS例子
- 接收消息msg_receive()
blablabla,队列中消息按照FIFO排列,但不绝对。Mach专为分布式系统设计。
3.2.5 Windows ALPC例子
高级本地程序调用 ALPC工具,同机器两进程之间,类似RPC远程系统调用。(不能给程序员用,不是API),但RPC有用到ALPC简介处理。
- 小消息<=256B,利用端口消息队列中转,直接复制
- 更大一点,用区段对象(相关共享内存区段)
- 太大时:服务器通过API读写客户端地址。
- 连接端口:处理连接请求
- 通信端口:
3.2.6 客户机/服务器通信例子
- 套接字socket:连接有一对socket
- RPC远程程序调用:传递有结构的数据。
每个单独远程过程都有一个--客户端提供stub存根
定义一个XDR外部数据表示,从而解决不同机器大端小端表示的差异。
保证每个消息执行正好一次。 - 管道。上面复习了
4. 多处理器调度
多个CPU负载分配问题。
- 非对称多处理器:一个CPU(作主服务器),处理所有调度决定、I/O等;;其他CPU负责执行代码。简单理解
- SMP对称多处理器:每个处理器自我调度,
- 可能只有一条ready队列
- 可能每个处理器一个ready队列
- 软亲和:进程尽量保持在to同一处理器上(不强硬)
- 硬亲和:允许在某个处理器子集上运行。
4.1 负载平衡
SMP系统尽量一视同仁对待各个处理器。
- 公共队列不用考虑,因为处理器空闲了自然回去找它的
- 私有队列:一个特定任务周期性检查每个处理器负载。
- 忙的就pull拉迁移
- 闲的就push推给它。
5. 实时CPU调度
硬实时要求严格,软实时就是尽量。
实时操作系统CPU特殊
5.1 优先权调度
抢占的优先权调度算法。
- 进程周期性的,定期需要CPU,固定处理时间t,进程的CPU处理截止期限d、CPU周期p。0<=t<=d<=p
- 调度程序任务:
- 准入控制,进来了就要保证进程完成
- 进不来,拒绝请求。
5.2 单调速率调度
抢占 分配优先级 = 周期↓优先级↑ or 周期↑优先级↓
频繁需要CPU的进程优先级更高
周期性进程,每次执行时,CPU执行长度相等。
5.3 最早截止期限优先调度
截止期限越早,优先级越高。抢占
6. 例 Linux调度
默认算法:CFS 完全公平调度程序,以vruntime为key的红黑树,vruntime↓越先运行,支持SMP。
- vruntime += 实际运行时间(time process run) * 1024 / priority
- 运行时间↑ vruntime↑-->CPU密集型在树右边
- I/O密集型运行时间短,稍稍右移(相对左移)
- priority 优先级:
- 根据友好值分配查优先级,默认为0,越重要友好值越小。
- 友好值↓,优先级↑。 友好值↑,优先级↓。
- 友好值每小一级,也就是优先级↑↑,CPU usage多10%,vruntime增加得越小,相对往树的左边移动,从而获得更多时间片。
- 根据友好值分配查优先级,默认为0,越重要友好值越小。
相关文章
- 【技术种草】cdn+轻量服务器+hugo=让博客“云原生”一下
- CLB运维&运营最佳实践 ---访问日志大洞察
- vnc方式登陆服务器
- 轻松学排序算法:眼睛直观感受几种常用排序算法
- 十二个经典的大数据项目
- 为什么使用 CDN 内容分发网络?
- 大数据——大数据默认端口号列表
- Weld 1.1.5.Final,JSR-299 的框架
- JavaFX 2012:彻底开源
- 提升as3程序性能的十大要点
- 通过凸面几何学进行独立于边际的在线多类学习
- 利用行动影响的规律性和部分已知的模型进行离线强化学习
- ModelLight:基于模型的交通信号控制的元强化学习
- 浅谈Visual Source Safe项目分支
- 基于先验知识的递归卡尔曼滤波的代理人联合状态和输入估计
- 结合网络结构和非线性恢复来提高声誉评估的性能
- 最佳实践丨云开发CloudBase多环境管理实践
- TimeVAE:用于生成多变量时间序列的变异自动编码器
- 具有线性阈值激活的神经网络:结构和算法
- 内网渗透之横向移动 -- 从域外向域内进行密码喷洒攻击